OpenCPI
Installation Guide
OpenCPI Release: v2.4.7
OpenCPI Installation Guide Page 1 of 107

Revision History
Revision Description of Change Date
1.0 Creation 2014-06-23
1.01 Add all FPGA and embedded system (Zed) content 2014-07-07
1.02 Update details for CentOS6 and Zed 2015-01-31
1.03 Update new simplified ZedBoard Installation 2015-02-27
1.1 Add ML605 details, change to use new/std doc template, bug fixes 2015-06-26
1.2 Add system.xml details 2016-05-18
1.3 Minor update for 2017.Q2 2017-09-07
1,4 Update for 2018.Q3, simplified CentOS and ZedBoard installation 2018-08-27
1.5 Update for 1.5 2019-04-30
1.6 Reorganize simulator chapter, add xsim information, add quick start, AV install 2019-12-31
1.7 Update for 1.7, fix some case in pathnames, add zynq release downloads for licensing 2020-06-16
1.9 Change to use ocpiadmin for install-platform and deploy-opencpi, remove zedboard
specific instructions which were redundant
2020-07-19
1.10 Remove CentOS6, re-organize chapter on third-party/vendor installation for Xilinx tools 2020-12-10
1.11 Add glossary section 2021-03-15
1.12 Update e31x and zed to use xilinx19_2_aarch32, bug fixes 2021-05-28
1.13 Remove AV GUI install, replace with OpenCPI GUI install, add picoevb, adrv9361-Z7035
to supported platform tables
2021-11-1
1.14 Update GUI installation procedure to use script and command 2022-1-11
1.15 Add air-gapped installation procedure 2022-01-19
1.16 Update Xilinx installation procedure, correct typo in OpenCPI GUI installation (PyQt) 2022-02-23
1.17 Add server mode instructions, add Avnet OSP, Xilinx OSP to supported platform tables 2022-05-30
1.18 Revise Chapter 7 to be PCIe platform-generic and include concept of runtime host 2022-08-31
1.19 Add new chapter on Ethernet-based platforms, change the term “PCIe card” to “PCIe-
based HDL platform” and rename chapter “Setting up PCI Express-based HDL Platforms”
2022-10-19
1.20 Remove references to Ubuntu 16.04 and add Ubuntu 20.04 2022-11-18
OpenCPI Installation Guide Page 2 of 107
Table of Contents
!"
# $%&'%()*
#&%$+)%&'%(
!"#$#$
%&'('(
#$%&(,
)'(%
*+'(,
(-+.
##$-&./(&0(*
#,$+%&.12%34
%(&/0
%)'(1"-0
%'(1"0
#5&%$'%()%% (6(
,23-( &4'5
, 4'564 &
,"74-%
, %%(&0(5
,,7,!
#4
,/,.8$.
#4
,##!
#4
,, 9 #!.8$.
#4
,5(+:;<
#4
,=+:>.8$.
#4
5 6$%&'%( (6(#
5%&0(##
5%(+&0(#,
,('Contents,
,7,
OpenCPI Installation Guide Page 3 of 107
,'('-''.
,% -8
,,9 4 &8
,.+2''-%0
,8"' &%
$?+%@A?,,
$B!?,5
.:;+-&%.
.:;<47(2=*-(12(%.
.:;=+>-'6):;>?)(@ ,A
.%:;&B&C>8000B&C>"-&,A
.,:;D;=">-'.0
..:;=+>-':;>?)(@.
.8:;<4D-+D-(12(.
.E:; %8+(12(.
$=(5
C 8$%& !%6)'D&0(
C$%&+&)C
C 6$+%&'%( (+&-&./"
C$%&+&)"
C 6$+%&'%( (+&-&./*
C# 6$+%& ! (+&-&./C4
C# 6$+%& ! (+&-&./C4
8 F-()80
89&CG')-8
8%(()'&8
8, DG+212--8
8.D'(()>'H&8
88&8
8E-ID'(D;=4-48
8A+'(J2&8
80<&8%
" $)'D&0( +EC5
* &($/$%%C
*'%&CC
*'F%C"
A'&'&8E
*# F%-C*
*,'&+&$"
*5'&:"#
A,"-HE
*%+/$%%("5
*C%%+#&$"
*" (A6"C
**F%&%""
OpenCPI Installation Guide Page 4 of 107
4 .?("*
4%&?($*4
4?($4#
OpenCPI Installation Guide Page 5 of 107

1 Overview
This document describes how to install OpenCPI from downloaded source code. The
basic installation is for a development “host” that supports development and execution
of OpenCPI applications using only software-based components. Additional optional
aspects of the installation enable development and execution of FPGA-based
components and applications that combine software and FPGA execution, using FPGA
simulators. FPGA simulators are considered target processors, which can execute
code written for FPGAs. There is also an optional GUI IDE as an alternative to using
command line tools.
This document does not describe how to install OpenCPI from packaged binary
distributions; for example, from CentOS or RedHat RPM packages. Binary packages
have not been produced for the current release but are planned for availability in a
future patch release.
To go beyond the basic development host installation and prepare for using OpenCPI
on embedded systems, some additional concepts are required:
OpenCPI systems consist of one or more processing platforms, thus enabling
OpenCPI to develop for a particular embedded system involves enabling
OpenCPI to target each of its platforms. Many systems targeted by OpenCPI
have a CPU-based platform for running software components and a different
FPGA-based platform for running HDL (Hardware Description Language)
components (e.g. VHDL).
Some platforms are optional/attachable/pluggable add-ons to a system. They are
not considered part of any system, so they are defined distinct from any particular
system.
OpenCPI projects are source code work areas/directories that contain code
developed under OpenCPI. When a project contains code to enable a particular
platform to be used by OpenCPI, it is called an OSP (OpenCPI System support
Project). When the support for a platform is included in the initial download of
OpenCPI, we say support is built-in to OpenCPI. If not, then the OSP that
includes such support requires separate downloading.
This document assumes a basic understanding of the Linux command line (or “shell”)
environment. It does not require a working knowledge of OpenCPI, although if anything
goes wrong with the installation, more experience with OpenCPI may be required. For
other documentation on OpenCPI, see opencpi.gitlab.io/opencpi. In particular, after
installation, OpenCPI users should visit the OpenCPI User Guide to start using it.
Below is a diagram that shows the basic installation steps to install and enable
OpenCPI to be used with development hosts as well as embedded systems:
OpenCPI Installation Guide Page 6 of 107
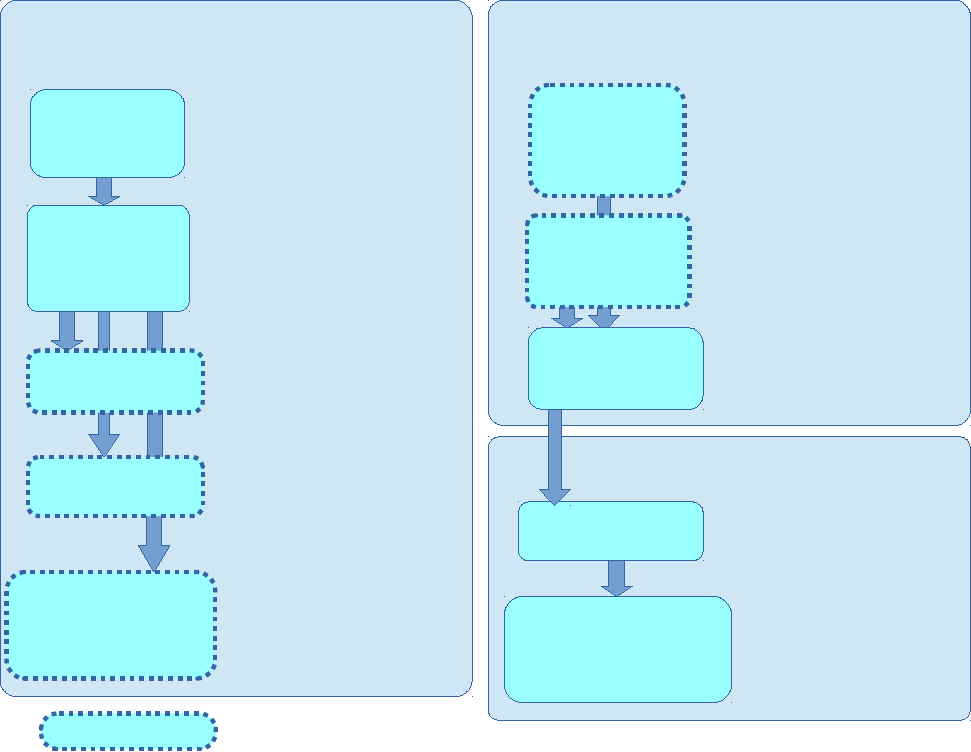
Figure 1: Installation Sequences
The most common installation platform for OpenCPI development hosts is CentOS7
Linux x86_64 (64-bit). Ubuntu18_04 and Ubuntu20_04 are also supported. Other
Linux and MacOS variants and 32-bit systems have been used successfully. CentOS7
64-bit is the default, tested installation for a development host. Development hosts can
either be actual physical systems or virtual machine installations.
Additional installation options exist for other typically embedded target processors such
as the Xilinx® Zynq® SoC (with ARM® processor cores and FPGA resources) and
various FPGAs. For embedded CPUs, OpenCPI uses cross-building on the
development host using tools that can target the embedded processors and FPGAs.
This document is divided into sections according to the above diagram.
OpenCPI Installation Guide Page 7 of 107
Installation Actions for the
Embedded System as a whole
Installation Actions For Each Platform
in an Embedded System
Installation Actions For Development Host
Enables:
OpenCPI to be
installed
Development
of OpenCPI
Software-based
Components and
Applications
OpenCPI Development
for FPGAs (simulated)
Usage of a GUI-based
development process
(rather than command
lines and text editors)
Usage of Development
Host to support
Development for
Embedded Systems
Install FPGA
Simulation Tool
Install GUI Tool
Prepare Dev Host for
Embedded Systems
Development
Prepare
Development
Host
Download and
Build OpenCPI
from Source
Enables:
Building the Platform
Building the Platform
Development for the
Platform and Creation
of System Boot Kit
(e.g. SD Card)
Booting the system
Execution on the
Embedded system
Generate the
Boot Kit/SD Card
Perform any Hardware
Configuration and
Install Boot Kit
Perform any
Required
Manual Tools
Installation
Download
OSP if Platform
is not built-in
Optional
Build Platform
from Source

2 Quick Start: Source Code Installation for Software-only Execution
This quick start section describes the procedure to establish an OpenCPI environment
for software-only (not FPGA) development and execution on development systems. If
any of the following requirements are not met, more detailed instructions are in following
sections.
The quick start is based on the most recent OpenCPI release, and requires:
A computer running the CentOS7 Linux or other supported development host
operating system that can be used as the target of OpenCPI, with the git
application installed.
Linux sudo privileges for the user installing OpenCPI on the development host
system.
The download uses git and thus has full SCM history that is easily updated. Use
these commands:
sudo yum install -y git
git clone https://gitlab.com/opencpi/opencpi.git
cd opencpi
./scripts/install-opencpi.sh
This leaves the git repository checked out on the master branch, which is the most
recent release. During the execution of the last command, you will be prompted twice
for your password.
This quick start accomplishes a software-only installation of OpenCPI, enabling an
OpenCPI user to become familiar with OpenCPI and run non-FPGA tutorials. The next
sections describe the process and steps in more detail with more options. If you used
this quick start method and want to enable FPGA development (recommended), skip
the next section and go to the Install ing FPGA Simulators section.
OpenCPI Installation Guide Page 8 of 107

3 Installing OpenCPI on Development Hosts
The basic installation on (Linux) development host systems enables the development
and execution of OpenCPI components and applications on the development host itself
(called native execution). It also establishes the host platform for the tools that enable
development for other target platforms, including embedded CPUs, real or simulated
FPGAs, and GPUs. The installation process takes these steps, in three phases:
Phase 1: Hardware and OS installation (only for installing CentOS from scratch)
1. Installing the hardware or creating a bare virtual machine.
2. Installing and configuring the operating system from CD or CD image file.
3. Updating the operating system to the latest patch level and enabling “sudo”.
At this this point we have a basic up-to-date OS installation. There are many
ways to get here, but we outline a basic approach that works on CentOS7. If
your system is already installed, this phase is skipped.
Phase 2: Download OpenCPI sources, and install prerequisite software packages.
4. Install the git software package, and use it to download the OpenCPI
source distribution.
5. Install standard required packages using the package update and installation
tools of the operating system distribution.
6. Install and build some prerequisite packages that need special OpenCPI-
supplied installation scripts.
At this point, we have installed all prerequisites and have a clone/copy of the
OpenCPI code tree ready to build on the OS installation.
Phase 3: Build and test OpenCPI
7. Build OpenCPI's core tools, libraries, components and example applications.
8. Execute some tests to verify that the installation is working.
These steps result in a development system with tools and runtime software ready to
support development and native execution (on the development system) of OpenCPI
components and applications. Steps 5 through 8 are done with a single command:
./scripts/install-opencpi.sh
This installation process is based on source code that is downloaded and built on the
development host.
The section Preparing the Hardware and OS for OpenCPI Development describes
Phase 1 in detail. The sections Obtaining the OpenCPI Code Base , “Installing
Required Standard Software Packages for OpenCPI” and “ Installing Preqrequisite
Packages for OpenCPI” describe Phase 2. The sections “ Building the OpenCPI
Framework and its Built-in Projects” and “Testing the Software Aspects of the
OpenCPI Installation Guide Page 9 of 107


3.1 Preparing the Hardware and OS for OpenCPI Development
The quick description of this OS installation section is: install the development
host OS, including the “git” software and enable your user ID for “sudo”.
This step is only necessary if you are installing the OS from scratch. If your OS is
already installed and up to date, your account is already sudo-enabled, and the git
command is available on your system, you can skip to the section Installing OpenCPI
from Source.
To just deal with the sudo and git issues on an installed OS, skip to: Enabling Your
User for sudo and Installing git .
Since a development host has no special hardware requirements, it must simply support
the recommended and supported development host operating system (e.g. CentOS7
Linux 64-bit). Some development tools (especially those for FPGAs) require large
memories and exploit multiple CPU cores and thus the minimum memory should be at
least 8GB, with 16GB or more preferred. For test purposes, VMs with 2GB have been
successful, but slow.
If the development host system will also host other embedded CPU or FPGA cards
acting as OpenCPI target platforms, the appropriate slots, cooling and power supplies
should be considered.
If the development host will also be the runtime host for Ethernet-attached devices
(such as the Ettus N210), it is sometimes useful to use dedicated Ethernet ports for
such devices. In this case, a host system with multiple Ethernet ports/interfaces should
be considered. This minimizes interference between Ethernet traffic to the locally-
attached platforms, and general LAN or WAN/internet traffic.
OpenCPI development is commonly hosted on laptops, server machines with card slots,
and virtual machines hosted on other operating systems. One example system is a
CentOS7 64-bit virtual machine running under the “Parallels” virtual machine system on
Apple MacBook Pro laptops. Another is a Dell server with well-powered PCI Express
slots for hosting a number of FPGA and/or GPU boards.
3.1.1 Obtaining the CD Image File for the OS Installation
The normal operating system installation starts with a CD image downloaded for the
development host OS. For CentOS7, this is from centos.org (or one of its mirrors).
An example of a “minimal” CentOS7 installation is described here. Many installation
scenarios are possible.
For a physical system, you can burn this CD image file (a.k.a. ISO file) onto a real
CD/DVD, and then boot from that physical CD/DVD. For a virtual machine, you can
usually designate that the CD/DVD image file be mounted to the virtual machine as a
virtual CD/DVD device.
Creating a virtual machine usually involves answering a few questions about the to-be-
created VM, and then booting it from the Installation CD/DVD image file. For most VM
OpenCPI Installation Guide Page 11 of 107
systems, the most import questions to answer are the amount of memory to give to the
VM, and the number of cores to provide. Each VM system does it slightly differently.
Booting the development host system from the CD or CD image file proceeds the same
whether it is a physical system or a VM.
For the case of using the Parallels VM system on Macs, we select “customize
settings before installation”, and set memory at 4GB and 2 cores/CPUs.
The CD image for the minimal CentOS7 installation is available from mirrors at:
http://isoredirect.centos.org/centos/7/isos/x86_64
The actual file name to download is:
CentOS-7-x86_64-Minimal-<version>.iso
This installation is suitable for command-line only (no GUI) headless systems, and
booting from the CD (image) immediately runs the installer. Other CentOS7 installation
images are available with more packages preinstalled on the image.
3.1.2 Booting from and Running the Installation CD/Image
When using CentOS7 with minimal CD image boots, it immediately runs an installer that
asks for things like language and root password. It is better not to create users at this
point, but to simply run the installer instead. When the installed system boots, it is in
command line (shell) mode. At this point, you must at least enable the network
interface, if not done during the installer, using the nmtui tool (the default network
interface is eth0), and then update your system using the command:
# yum update
To ensure that you are up to date, you must reboot (using the reboot command) after
yum update, and then, after the reboot, run yum update again, and repeat this
process until “No packages marked for update” is displayed.
On the command line you can add users, using the simple adduser command. An
example would be:
# adduser -m -N -r -u 501 -g 20 user1
You only need to specify the user and group ids if you are trying to match them to an
existing installation for convenient NFS mounting. Otherwise you can simply use:
# adduser -m user1
This would use default behavior to create the account and home directory.
3.1.3 Enabling Your User for “sudo” and Installing “git”
A number of scripts supplied by OpenCPI require that the user be enabled for the “sudo”
command. You should add your user account to the list of accounts that are allowed to
use “sudo”. On the CentOS7 minimal installation, you are already at the command line.
With <RootPasswd> and <User> being replaced by your root password and your user
name, do:
OpenCPI Installation Guide Page 12 of 107

% su
Password: <RootPasswd>
# echo <User> ALL = ALL >> /etc/sudoers
# exit
%
The “% “ and “# “ are just command prompts: you don't type them. Be careful to use
the two “>>” characters to append the line to the file. Of course if you are experienced
with Linux, you may do this many other ways.
OpenCPI has several software prerequisites, but only one of them is required to be
installed before the OpenCPI code base is installed: git. The git program is used to
download a local copy of the code base, and after that, a script in the code base is used
to finish the installation of OpenCPI. To obtain git, the following command should be
issued at the command prompt in the terminal window:
% sudo yum -y install git
This ensures that you have the git package installed on your system so that you can
use the git command. Git is the distributed revision control system used by
OpenCPI. We will only use a few git features and commands for installation.
3.1.4 Summary of Installation Steps Prior to Installing OpenCPI
Download the development host OS CD image file, and check the md5 digest.
For physical systems, burn a CD from that file.
Boot the physical or VM system from the CD or CD image file.
Run the OS installer using the “Install to HardDrive” icon and answer questions.
Note: be sure to select manual partitioning so that you can allocate most of the
disk space to the root (/) partition.
Boot your newly installed system and answer more questions.
Upgrade the software repeatedly until there are no more updates available.
Enable your user ID for the sudo command.
Install the git configuration management software.
You now have an installed, up-to-date operating system, with a user account that is
sudo-enabled and the git software configuration management package is available.
OpenCPI Installation Guide Page 13 of 107
3.2 Installing OpenCPI from Source
We assume you are in a shell window, in the directory where the codebase should go,
into a subdirectory, which the following commands will create.
The source installation procedure downloads, builds and uses the software in a
directory of the user's choosing (for example, ~/opencpi). As a result, multiple versions
can be downloaded and coexist, but not execute simultaneously.
OpenCPI source installations make no global changes to the user's system other than:
Installing or updating some required standard packages using the yum install or
equivalent command.
Dynamically/temporarily loading and using the OpenCPI kernel driver in order to
test it.
Both these steps require sudo privileges.
3.2.1 Download OpenCPI using git
To download OpenCPI via cloning the entire OpenCPI code base with history, issue the
following command:
git clone https://gitlab.com/opencpi/opencpi.git
The above command creates an opencpi subdirectory and populates it with the
current OpenCPI code base: i.e., a “git clone” of the code base that can be easily
updated in the future. Change into the created subdirectory.
cd opencpi
By default, the git clone operation downloads the “latest stable” release (called the
master branch). This may or may not be what you want. After downloading, if you
want a specific, perhaps earlier release, you use the git tag command to list the
tagged releases available, then set the code base to the one you want, using git
checkout, with the release tag (as listed by git tag) as an argument.
The OpenCPI source code releases are tagged with the following format:
v<major>.<minor>.<patch>
For example, a recent release was:
v1.5.0
Early releases of a next minor release are identified with minor releases starting with
“rc” for “release candidate”, e.g.:
v.1.5.0-rc.0
List the available tagged releases with the command:
git tag
Check out the tagged release you want with the command:
git checkout <release-tag>
OpenCPI Installation Guide Page 14 of 107

Whenever you check out a different tag after any building activity, or want to return this
tree to its downloaded and checked-out state, you can perform a clean operation on the
code base:
% make cleaneverything
Now you can install, build and test OpenCP.
Summary of Steps to Prepare the OpenCPI Code Base using git
% git clone https://gitlab.com/opencpi/opencpi.git
% cd opencpi
% git tag
% git checkout v1.5.0 # use tag from git tag output
You now have an OpenCPI source tree configured for a specific tagged version of
OpenCPI.
3.2.2 Install, Build and Test OpenCPI
After performing the above steps to obtain the code base (using git clone and cd to
the opencpi subdirectory), you are in the top-level directory of the source distribution.
At this point, you can use one command to perform the rest of the installation, including
running some tests to ensure that the installation is working. This command is:
./scripts/install-opencpi.sh
This command may take a while to complete and will require you to provide the sudo
password twice for the two global actions described earlier. It is not recommended nor
supported to perform the whole installation under sudo or as root.
If you are not present to provide the password, it may fail, but it can be rerun.
It will require internet access to download and build software it needs. Occasionally
some download sites are unavailable and the command must be repeated when they
are available.
The testing done by this script only executes software-based components and
applications. After this command completes and succeeds, OpenCPI is ready for use
on the development host for OpenCPI software components and applications. At this
point you can take the next installation step by Installing an FPGA simulator.
After running the install-opencpi.sh script:
You now have an OpenCPI installation built and tested, ready to be used. This does not
include FPGA tools, code, or bitstreams, or support for embedded systems, which are
separate installation steps.
The last step before actually using OpenCPI is to establish the OpenCPI environment
using:
source <where-is-opencpi>/cdk/opencpi-setup.sh -s
OpenCPI Installation Guide Page 15 of 107

A user may wish to put this command in their ~/.bash_profile (after any PATH
settings) if every shell/terminal window should automatically have the OpenCPI
environment established. The string <where-is-opencpi> is the directory where
OpenCPI is installed. This is explained further in the OpenCPI User Guide. Since in
this case we are actually in the OpenCPI source installation directory, we can simply do:
source cdk/opencpi-setup.sh -s
3.2.3 Details of the Installation Process for Troubleshooting
The following description is for the curious or when the above install-opencpi.sh
script fails. If it succeeds, the rest of this section is just a detailed description of what
the script does. This script performs these functions, in order, with each depending on
the previous ones:
1. Install standard packages required for OpenCPI development, globally on the
system, from the OS's repository. This is accomplished using the underlying
install-packages.sh script described below. Important examples of such
required packages are make and python. For CentOS or Redhat Linux, this
script uses the yum install command.
2. Build and/or install prerequisite packages for OpenCPI, in an area only used
by this installation of OpenCPI (i.e. sandboxed). This will compile these
packages as necessary for the development host. The
install-prerequisites.sh script performs this function and is
described below. This usually involves downloading source tarballs for the
package and building them.
3. Build the OpenCPI framework (libraries and executables) itself. This step
and the following one are accomplished using the build-opencpi.sh
script described below.
4. Build the built-in projects that are part of the OpenCPI source distribution, for
all software assets (RCC workers and ACI applications).
5. Run a number of tests to verify the installation. This step uses the
ocpitest command.
These underlying steps can be run individually for troubleshooting purposes, but are
otherwise unnecessary. The rest of this section describes them in more detail, but can
be skipped if the install-opencpi.sh script succeeds.
3.2.3.1 Installing Required Standard Software Packages for OpenCPI
This step (#1 above) uses the underlying script:
scripts/install-packages.sh
Most OS distributions are associated with an internet-based repository of software
packages, and have a way to install packages from that repository. For Redhat and
CentOS Linux systems, the yum command is used to access software packages in the
repository for that OS. Most embedded/cross-compiled OSs do not have such a
repository, but might. When this yum/rpm type of package is installed on your system,
OpenCPI Installation Guide Page 16 of 107
it is globally visible and usable and is not removed when the OpenCPI directory you
created for the installation is removed. In this way, this script simply adds standard
software to your system if it is not already there.
Since different OSs use different package management systems, this script uses the
appropriate commands for the OS you are running on and adds the packages required
for OpenCPI development.
Since installing packages on to your system typically requires sudo privileges, a
password prompt usually happens when this script is run. Do not run the command
using sudo directly.
3.2.3.2 Installing Prerequisite Packages for OpenCPI
This step (#2 above) uses the script:
scripts/install-prerequisites.sh [-f]
We use the term prerequisite to mean software required by OpenCPI framework
software or its built-in projects that must be compiled specifically for OpenCPI for all
software platforms whether cross-compiled or not. These are built and used specifically
for OpenCPI, in directories inside the OpenCPI installation's file hierarchy and are thus
not used nor visible to other software on the system.
When this script is used for a cross-compiled platform, it first ensures that the
prerequisites are also installed for the development system you are running on.
It also checks whether the targeted software platform has any platform-specific
prerequisites (such as a cross-compiler not otherwise needed), and
builds/installs those before installing the generic prerequisites required for all
software platforms.
This script checks for a timestamp indicating that all the prerequisites for a platform
have been built/installed and does not do it again unless the force option (-f) is
specified. It also recognizes when the download for each prerequisite has been done
before and does not re-download software, even if the force option (-f) causes it to be
built/installed again.
Prerequisites are usually downloaded from the internet based on URLs for each
prerequisite. If your organization does not allow this (or is not connected to the
internet), and has a staging server or file share for vetted downloads, the following
environment variables can be used to redirect the download process to an alternative
local server or file share instead of the server indicated by the internet URL associated
with the prerequisite.
OCPI_PREREQUISITES_LOCAL_SERVER replaces the host part of the URLs, and
assumes that all the prerequisite downloads will be found at that server.
OCPI_PREREQUISITES_LOCAL_PATHNAME replaces the host part of the URL with
a local directory path.
If you set both, they both will be tried.
OpenCPI Installation Guide Page 17 of 107
3.2.3.3 Building the OpenCPI Framework and its Built-in Projects
This step (#3 and #4 above) uses the script:
scripts/build-opencpi.sh
This building script will build:
The core software infrastructure libraries, and utility command executables.
The OpenCPI Linux kernel/device driver
The software components in libraries in the built-in projects.
Some example applications in the built-in projects.
This script first builds the OpenCPI framework executables, libraries and drivers, and
then builds the software aspects of the built-in projects for the targeted software
platform. It does not do any HDL (FPGA) building in the built-in projects since that
depends on what FPGA tools may be available, and is thus done separately after this
development host OpenCPI installation.
3.2.3.4 Testing the Software Aspects of the Installation
This step (#5 above) uses the script:
scripts/test-opencpi.sh
A variety of tests are run. One is to test loading the kernel driver, which requires sudo
privileges and typically prompts for a password. The last message displayed by the test
script should be like this:
All tests passed: driver os datatype load-drivers container assets
swig python av ocpidev core inactive
OpenCPI Installation Guide Page 18 of 107

3.3 Installing FPGA Simulation Platforms
For OpenCPI to be used as a heterogeneous development framework for FPGAs, it is
necessary to install one or more FPGA simulators. This is highly recommended and is
a requirement for most of the tutorials for learning OpenCPI. OpenCPI considers an
FPGA simulator as “just another FPGA platform”. This is done separate from any setup
necessary for actual FPGA hardware platforms. Setting up an FPGA simulator for use
as an OpenCPI platform usually consists of:
1. Installing the simulation software according to the FPGA tool vendor’s
instructions, which in some cases requires a purchased license.
2. Perhaps setting some simulator-specific environment variables in the <where-
opencpi-is-installed>/user-env.sh file (normally unnecessary).
3. Building the built-in projects for the simulation platform using the script (this
can take 10-15 minutes):
ocpiadmin install platform <simulation-platform>
OpenCPI currently supports the following third-party FPGA simulators:
xsim, which comes with the Xilinx Vivado® Design Suite HLx Edition tool set. The
Xilinx Vivado WebPACK section in this guide provides instructions on how to
download and install the free, unlicensed variant of this simulator and its tool set.
modelsim, offered by Mentor, a Siemens business. The Modelsim section in this
guide provides more information about how to set up this simulator.
isim, which comes with the Xilinx ISE® Design Suite tool set. The Isim section in
this guide provides more information about how to set up this simulator.
Installing the free (WebPACK) version of xsim is the recommended first step for all
installations. The modelsim simulator is considerably faster, but also is expensive.
OpenCPI Installation Guide Page 19 of 107

3.4 Installing the OpenCPI GUI (Optional)
OpenCPI provides a GUI development tool called OpenCPI GUI that you can optionally
install from source and use as a GUI alternative to many of the OpenCPI command-
based development tools (mostly one called ocpidev). To install the OpenCPI GUI:
Install the pre-requisite GUI support toolkit PyQt
Download the OpenCPI GUI source code base with git
Install the OpenCPI GUI from its downloaded location
3.4.1 Installing PyQt
OpenCPI GUI requires the PyQt GUI toolkit package. To install this package on
CentOS7 development hosts, issue the command:
sudo yum install python36-qt5.x86_64
To install this package on Ubuntu development hosts, issue the command:
sudo apt install python3-pyqt5
Note: in a future release, the PyQt package will be automatically installed when
OpenCPI is installed and this step will no longer be necessary.
3.4.2 Downloading the OpenCPI GUI Source using git
To download the OpenCPI GUI via cloning the entire code base with history, issue the
command:
git clone https://gitlab.com/opencpi/ie-gui.git
This command creates an ie-gui subdirectory in the directory where you issue it and
populates this subdirectory with the current OpenCPI GUI code base (a “git clone” of the
code base that can easily be updated in the future).
3.4.3 Installing the OpenCPI GUI
To install the OpenCPI GUI, change directory to the ie-gui subdirectory and then run
the following command:
./install-gui.sh
When the installation completes, the OpenCPI GUI can be started with the command:
ocpigui[options]
See the ocpigui(1) man page for usage information about the command. See the
OpenCPI GUI User Guide for information about OpenCPI GUI configuration and
operation.
Note: before invoking ocpigui, be sure to establish the OpenCPI environment in the
shell/terminal window being used to start the GUI. The command to do so is:
source <where-is-opencpi>/cdk/opencpi-setup.sh -s
where <where-is-opencpi> is the directory where OpenCPI is installed.
OpenCPI Installation Guide Page 20 of 107
3.5 Preparing a Development Host to Support Embedded Systems
There are several optional setup tasks on development hosts to prepare using attached
embedded systems. The two “attachments” are serial consoles and NFS mounts. Most
embedded systems boot from SD cards, and the development host typically needs a
drive for writing such cards.
3.5.1 Attaching Serial Port Consoles of Embedded Systems to Development Hosts
When embedded systems have serial consoles, it is common and helpful to attach them
to the development systems so that console input and output are in a window on the
development system. In the common case where this connection is actually a USB
cable that is emulating a serial port, this requires that the development host be prepared
to recognize these USB connections as serial ports.
On most systems this recognition is automatic, so when the cable is plugged in, there is
a Linux/UNIX tty device dynamically created in the /dev directory. Thus a terminal
emulator application can be directed to connect this tty device and its window will be a
console for the embedded system. Two problems arise from this situation:
The name of the tty device is arbitrary and unpredictable, and if there is more than
one attached embedded system, it is hard to know which is which.
The permissions of the device are commonly set to read-only.
3.5.1.1 Using udev Rules Files on Linux
Linux has files that help with the auto-recognition process (called udev rules files),
which can fix the naming and permission problems as long as there is only one USB-
based serial cable with the vendor and part of that embedded system. Each supported
OpenCPI embedded system with a USB serial console port and cable provides one of
these files that can be symbolically linked into the system directory where such files live,
namely:
/etc/udev/rules.d
So for OpenCPI hardware platform <pf>, you would issue this command to tell the
system how to connect it to the development system:
sudo ln -s $OCPI_CDK_DIR/<pf>/udev_rules/*.rules /etc/udev/rules.d
Of course this modifies the development host system outside of this OpenCPI
installation and could potentially conflict with other installations or software packages.
These udev rules files that are specific to a given platform usually result in the tty
device with the name:
/dev/tty<pf>_0
that can be provided to the terminal emulator application.
The udev rules files are typically examined by the system at boot time, and if the
symbolic links created above point to file systems that are not mounted early in the boot
OpenCPI Installation Guide Page 21 of 107
process, you may need to tell the system to re-examine the udev rules files later. This
is done using the command:
sudo udevadm control --reload
3.5.1.2 Using Console tty Ports without udev Rules
If there is no udev rules file for a platform or there are multiple platforms of the same
type with console serial cables, the tty device can be determined manually by looking
in the /dev directory and seeing which devices appear when the cable is plugged in.
Then to fix the permission problem you need to issue the following command every time
the cable is plugged in or the embedded system is reset or the development host is
reset:
sudo chmod 666 /dev/<new-tty-device-appearing-when-cable-plugged-in>
3.5.1.3 Using a Terminal Emulator Program to Access the Console Port
The most common terminal emulator application on Linux systems is screen, where
the command to run that application with a window connected to that serial port would
be:
screen /dev/<tty-device-name> <baudrate>
Where <baudrate> is the speed of the serial port.
For Emacs users, you can use the serial terminal emulator built in to Emacs, by simply
doing: M-x serial-term in a window, and providing the /dev/tty<xxx> name and
baud rate when prompted. There are two modes in this window, char and line. The
default is char mode, where every character typed is immediately sent without any
interpretation at all. This means no Emacs keyboard commands work in that Emacs
window and you have to use the mouse to switch to another Emacs window. The line
mode is more line buffered, like Emacs shell mode, and all line editing and other Emacs
commands work fine. But the display can get confused in this line mode so you have
sometimes switch back and forth: control-c control-j switches to line mode,
control-c control-k switches to char mode, and control-c control-c sends
a control C in char mode.
With a good terminal emulator connection, hit return a few times in the serial console
window to see the console prompt, or, if the system was previously logged in and
running, you might already see the prompt.
Sometimes if the screen or terminal emulator is confused, or if, after hitting "return", the
prompt stays on the same line, try typing the command "clear", to clear the state of the
terminal emulator.
3.5.2 Enabling the Development Host to be an NFS Server for the Embedded System
It is frequently useful to be able to mount and access the file systems on the
development system where the OpenCPI codebase is built and cross-built. This\
requires that the development system be enabled as a file server, and any associated
firewall issues are addressed between the embedded system and the development
OpenCPI Installation Guide Page 22 of 107
host. This configuration typically uses nfs, with the embedded system acting as an
nfs client and the development system acting as the nfs server.
The NFS server needs to be enabled on the development host in order to run the
embedded systems in Network Mode. If Network Mode is not being used, it is not
necessary. Directions on how to do this for CentOS7 are described here. Many
development systems are already enabled as NFS servers, but not all.
From the host, allow NFS past SELinux
1
:
% sudo setsebool -P nfs_export_all_rw 1
% sudo setsebool -P use_nfs_home_dirs 1
From the host, allow NFS past the firewall:
% sudo firewall-cmd --permanent --zone=public --add-service=nfs
% sudo firewall-cmd --permanent --zone=public --add-port=2049/udp
% sudo firewall-cmd --permanent --zone=public --add-service=mountd
% sudo firewall-cmd --permanent --zone=public --add-service=rpc-bind
% sudo firewall-cmd --reload
Define the export(s) by creating a new file in the /etc/exports.d directory,
/etc/exports.d/user_ocpi.exports
It must have the extension .exports, otherwise, it will be ignored.
Add the following line to that file and replace XX.XX.XX.XX/MM with a valid netmask for
the DHCP range that the SDR will be set to for your network, e.g. 192.168.0.0/16.
This should be as “tight” as possible for security reasons. Do not share out your top-
level directory! This would allow theft of your private ssh keys, etc!
<opencpi> XX.XX.XX.XX/MM(rw,sync,no_root_squash,crossmnt)
Where <opencpi> is your OpenCPI installation (git repo). Any other projects or files
outside that installation would require additional, separate exported mount points.
If the file system that you are mounting is XFS, then each mount needs to have a
unique fsid defined. Instead, use:
<opencpi> XX.XX.XX.XX/MM(rw,sync,no_root_squash,crossmnt,fsid=33)
After creating this file, run these commands to have the changes take effect:
% sudo systemctl enable rpcbind
% sudo systemctl enable nfs-server
% sudo systemctl enable nfs-lock
% sudo systemctl enable nfs-idmap
% sudo systemctl restart rpcbind
% sudo systemctl restart nfs-server
% sudo systemctl restart nfs-lock
% sudo systemctl restart nfs-idmap
1 You can use getsebool to see if these values are already set before attempting to set them. Some
security tools may interpret the change attempt as a system attack.
OpenCPI Installation Guide Page 23 of 107

Some of the enable commands may fail based on your system configuration, but
usually does not cause any problems.
3.5.3 Using SD Card Reader/Writer Devices
SD card reader/writer devices are required when the embedded systems use such
cards and it is required to make changes to them. Reading an SD card is sometimes
necessary to “patch” it to add new files while leaving some of its contents and formatting
untouched. Most such devices are pluggable USB devices.
The first step when using an SD card is to discover its device name, which is usually
something like /dev/sdb or /dev/mmcblk0. After inserting a card, the following
command usually has output that identifies the device name:
dmesg | tail -n 15
To make a backup copy of a card, into a file called backup.image, use this command:
dd if=<device-name> of=backup.image
To write the image file back onto an SD card, use:
dd of=<device-name> if=backup.image
To actually use or change the contents of file systems on an SD card, it must be
mounted such that its partitions are accessible as file systems. In most cases the file
systems on an SD card are automatically mounted upon insertion, and the mount point
(root directory of the partition's file system) can be discovered using the df -h
command that lists mounted file systems and their capacities.
If the desired partition is not automatically mounted, you must 1) discover the device's
name (as above), 2) the partition's name, 3) possibly create a mount point, and 4)
mount it. Search the internet for “how to mount an SD card” for many approaches to
this on many systems.
Information about preparing SD cards for enabling embedded systems for OpenCPI is
in the SD Card Preparation section.
OpenCPI Installation Guide Page 24 of 107

4 Supported Systems and Platforms
This section provides a series of tables that contain information about the development
systems, FPGA simulators, embedded systems and platforms supported by OpenCPI.
It is intended as a guide to the supported software and hardware configurations and
their requirements and dependencies.
Below is a list of supported development system types, with the corresponding
OpenCPI software platform and URLs for related information and download. All
supported development platforms are in the ocpi.core project built in to OpenCPI.
Other unsupported or not-yet-supported development system types can be in external
projects. The default supported development platform is centos7.
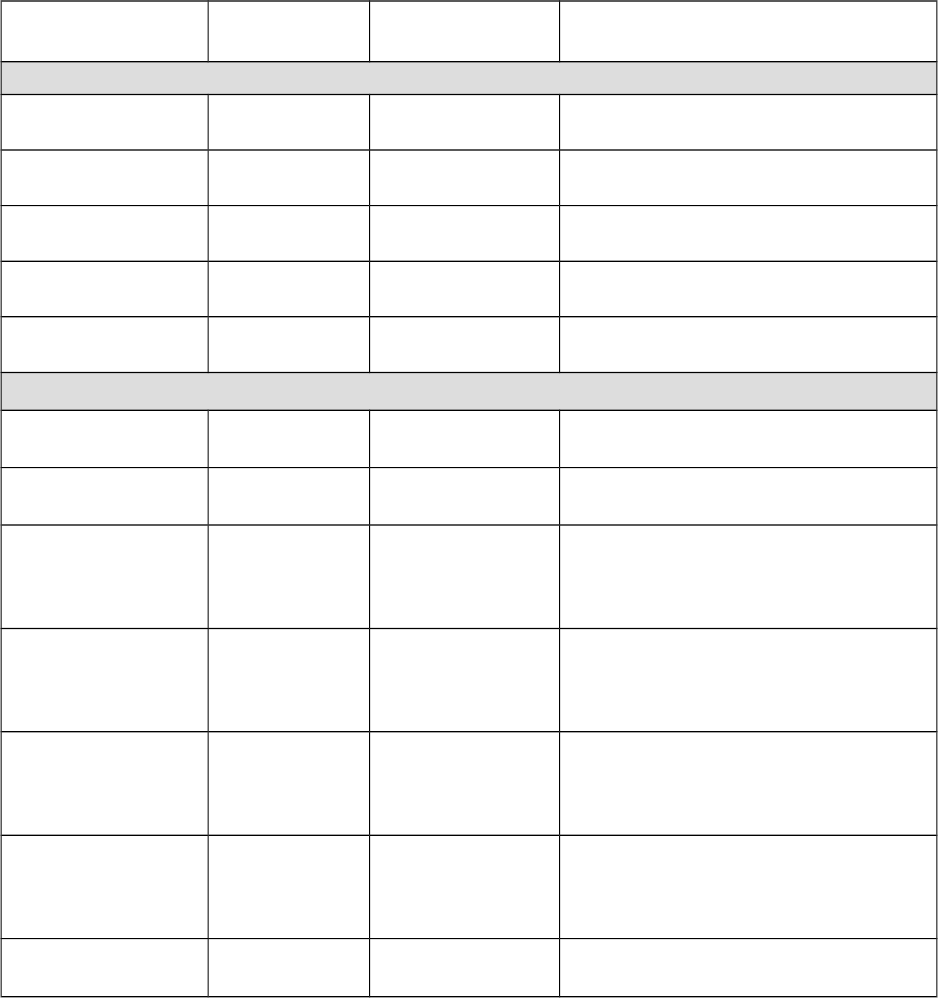
Table of Supported Development Systems (Hosts)
Description
OpenCPI
Software
Platform
Limitations Vendor Links
CentOS7
Linux on
x86-64 bit
centos7
CentOS7 general information link
CentOS7 download link
Rocky 8
Linux on
x86-64 bit
rocky8
Rocky 8 general information link
Rocky 8 download link
Ubuntu 18.04
Linux on
x86-64 bit
ubuntu18_04
Ubuntu 1 8 .04 LTS general information link
Ubuntu 1 8 .04 LTS download link
Ubuntu 20.04
Linux on
x86-64 bit
ubuntu20_04
Ubuntu 20 .04 LTS general information link
Ubuntu 20.04 LTS download link
MacOS
Catalina
10.15
macos10_15
No FPGA
tools or
drivers
MacOS Catalina general information link
MacOS Catalina download link
OpenCPI Installation Guide Page 25 of 107

Below is the list of supported FPGA simulators and the corresponding OpenCPI
“hardware” (HDL) platforms. When the associated tools are installed on a
development system, the development system then includes these platforms in addition
to the software platform. These simulators enable FPGA development without actual
FPGA hardware. The default and recommended FPGA simulator is xsim, which is part
of the free (WebPACK) version of the Xilinx Vivado tools package.
Table of Supported FPGA Simulators
Description
OpenCPI
Platform
Vendor Links
Xilinx
Vivado XSIM
2017.1-
2021.2
xsim
Vivado® Simulator (XSIM) is part of all Vivado HL Editions,
including the free WebPack edition.
Vivado Simulator general information link
Vivado Simulator download link
Xilinx
ISE ISim
14.7
isim
ISE® Simulator (ISim) is part of the older Xilinx ISE tool set.
ISE/I S im general information link
ISE/I S im download link
Siemens/Me
ntor
Modelsim
10.4c-10.6c
modelsim
Modelsim® is powerful, fast and expensive.
Mode lsim general information link
No download link available before purchase.
On the next page is a table of supported embedded systems, which includes the
platforms each system consists of. Embedded systems generally have a software
processor (CPU) using the “primary” OpenCPI software platform, along with other,
usually hardware/FPGA, platforms. A physical processor (CPU) or processing device
(FPGA) may be supported by a variety of OpenCPI platforms (versions or OSes).
OpenCPI Installation Guide Page 26 of 107

Table of Supported Embedded Systems
Description OSP
Repository
Primary
Software
Platform(s)
Other Platforms
in the system
Vendor Links
Epiq Solutions
Matchstiq-Z1
radio
Part of OpenCPI
xilinx13_3 matchstiq_z1
epiqsolutions.com/m
atchstiq
Avnet®
ZedBoard
Part of OpenCPI
xilinx19_2_
aarch32
Using Vivado:
zed
Using ISE:
zed_ise
zedboard.org
Ettus
E310 USRP™
gitlab.com/openc
pi/osp/ ocpi.osp.e
3xx
xilinx19_2_
aarch32
e31x
www.ettus.com/
all-products/e310
Analog
Devices™
ADALM-
PLUTO
gitlab.com/openc
pi/osp/ocpi.osp.p
luto
adi_plutosdr0
_32
plutosdr
wiki.analog.com/univ
ersity/tools/pluto
Analog
Devices
ADRV9361-
Z7035
gitlab.com/openc
pi/osp/ocpi.osp.a
nalog
xilinx19_2_
aarch32
adrv9361
www.analog.com/en/
design-
center/evaluation-
hardware-and-
software/evaluation-
boards-
kits/adrv9361-z7035
Avnet
MicroZed™
gitlab.com/openc
pi/osp/ocpi.osp.a
vnet
xilinx19_2_
aarch32
microzed_10_cc
microzed_20_cc
microzed.org
Avnet
PicoZed™
gitlab.com/openc
pi/osp/ocpi.osp.a
vnet
xilinx19_2_
aarch32
picozed_10_cc
picozed_15_cc
picozed_20_cc
picozed_30_cc
picozed.org
Xilinx® Zynq
UltraScale+™
ZCU102
gitlab.com/openc
pi/osp/ocpi.osp.xi
linx
xilinx19_2_
aarch64
zcu102
www.xilinx.com/prod
ucts/boards-and-
kits/ek-u1-zcu102-
g.html
Xilinx Zynq
UltraScale+
ZCU111
gitlab.com/openc
pi/osp/ocpi.osp.xi
linx
xilinx19_2_
aarch64
zcu111
www.xilinx.com/prod
ucts/boards-and-
kits/ek-u1-zcu1 11 -
g.html
The following table lists all supported platforms (software and hardware) in the current
release. Every system running OpenCPI contains one or more platforms that support
OpenCPI Installation Guide Page 27 of 107
different components of an application running on different platforms in the system.
Some platforms may be optionally attached/inserted/plugged into a system, such as
PCI-Express plug-in cards with FPGA or CPUs on them.
Each entry in the table specifies the platform name, the OpenCPI project that supports
it, and any vendor tool installations that the platform requires. The chapter “Installing
Third-party/Vendor Tools” in the OpenCPI Installation Guide provides download and
installation information for most of these vendor tools.
Table of Supported Platforms
OpenCPI
Platform Name
Description
OpenCPI
Project/Repo
Dependencies required before
building/installing the platform
Development Host Platforms
centos7
CentOS7 on
x86_64 CPUs
ocpi.core
built-in
A CentOS7 installation
rocky8
Rocky 8 on
x86_64 CPUs
ocpi.core
built-in
A Rocky 8 installation
ubuntu18_04
Ubuntu 18.04 on
x86_64 CPUs
ocpi.core
built-in
An Ubuntu 18.04 installation
ubuntu20_04
Ubuntu 20.04 on
x86_64 CPUs
ocpi.core
built-in
An Ubuntu 20.04 installation
macos10_15
MacOS
Catalina
ocpi.core
built-in
A MacOS Catalina installation
Embedded Software Platforms
xilinx13_3
Xilinx Linux 14.7
from 2013 Q3
ocpi.core
built-in
ISE® EDK 14.7 or Vivado® SDK 2013.4
Xilinx Linux tag: xilinx-v14.7
xilinx13_4
Xilinx Linux 14.7
from 2013 Q4
ocpi.core
built-in
ISE® EDK 14.7 or Vivado® SDK 2013.4
Xilinx Linux tag: xilinx-v2013.4
xilinx19_2_
aarch32
Xilinx Linux from
2019Q2 (2019.2)
For Zynq-7000
ocpi.core
built-in
Xilinx Vitis™ SDK 2019.2
Xilinx Binary Zynq Release 2019.2
Xilinx Linux git clone
Xilinx Linux tag: xilinx_v2019.2
xilinx19_2_
aarch64
Xilinx Linux from
2019Q2 (2019.2)
For Zynq-Ultra
ocpi.core
built-in
Xilinx Vitis SDK 2019.2
Xilinx Binary Release 2019.2
Xilinx Linux git clone
Xilinx Linux tag: xilinx_v2019.2
xilinx21_2_
aarch32
Xilinx Linux from
2021Q2 (2021.2)
For Zynq-7000
ocpi.core
built-in
Xilinx Vitis SDK 2021.2
Xilinx Binary Zynq Release 2021.2
Xilinx Linux git clone
Xilinx Linux tag: xilinx_v2021.2
xilinx21_2_
aarch64
Xilinx Linux from
2021Q2 (2021.2)
For Zynq-Ultra
ocpi.core
built-in
Xilinx Vitis SDK 2021.2
Xilinx Binary Release 2021.2
Xilinx Linux git clone
Xilinx Linux tag: xilinx_v2021.2
adi_plutosdr0
_32
Analog Devices
Pluto Linux 0.32
ocpi.osp.
plutosdr
Vivado SDK 2019.2
OpenCPI Installation Guide Page 28 of 107

OpenCPI
Platform Name
Description
OpenCPI
Project/Repo
Dependencies required before
building/installing the platform
FPGA/HDL Platforms
zed
ZedBoard Zynq
FPGA w/Vivado
ocpi.platform
built-in
Vivado WebPACK
zed_ise
ZedBoard Zynq
FPGA w/ISE
ocpi.platform
built-in
ISE 14.7 WebPACK
zed_ether
ZedBoard Zynq
FPGA/PL w/dual
1 GbE
ocpi.platform
built-in
Vivado WebPACK
matchstiq_z1
Epic Solutions
Zynq FPGA/PL
ocpi.assets
built-in
Vivado WebPACK
e31x
Ettus E31x Zynq
FPGA/PL
ocpi.osp.e3xx
Vivado WebPACK
ml605
Xilinx PCI-
Express
card w/Virtex6
ocpi.assets
built-in
ISE 14.7
alst4,
alst4x
Altera PCI-
Express card
w/Stratix4
gx230, gx530
ocpi.assets
built-in
Quartus12.1+
gx230: User Guide, Ref Manual
gx530: User Guide, Ref Manual
plutosdr
Analog Devices
ADALM-PLUTO
ocpi.osp.
plutosdr
Vivado WebPACK
zcu104
Xilinx Zynq-
UltraScale+ Dev
Bd
ocpi.platform
built-in
Vivado WebPACK
zcu106
Xilinx Zynq-
UltraScale+ Dev
Bd
ocpi.platform
built-in
Vivado WebPACK
picoevb
RHS Research
PicoEVB
ocpi.platform
built-in
Vivado WebPACK
adrv9361
Analog
ADRV9361 Zynq
FPGA/PL
ocpi.osp.
analog
Vivado licensed
microzed_10_cc
microzed_20_cc
Avnet MicroZed
Zynq FPGA/PL
ocpi.osp.avnet
Vivado WebPACK
picozed_10_cc
picozed_15_cc
picozed_20_cc
picozed_30_cc
Avnet PicoZed
Zynq FPGA/PL
ocpi.osp.avnet
Vivado WebPACK
zcu102
Xilinx Zynq
UltraScale+
MPSoC
ocpi.osp.xilinx
Vivado licensed
zcu111
Xilinx Zynq
UltraScale+
RFSoC
ocpi.osp.xilinx
Vivado licensed
OpenCPI Installation Guide Page 29 of 107

OpenCPI
Platform Name
Description
OpenCPI
Project/Repo
Dependencies required before
building/installing the platform
x310
Ettus X310
Xilinx Kintex-7
FPGA w/dual
1/10 GbE
ocpi.osp.ettus
Vivado licensed
Some of the platforms listed in the table above require system-specific setup
procedures to be performed in addition to the general procedures described in the
OpenCPI Installation Guide. The following table lists these systems and provides links
to the corresponding setup documents for these systems.
Table of Platforms with System-Specific Setup Requirements
OpenCPI Platform Name OpenCPI System-Specific Setup Guide
4.1.1 alst4, alst4x 4.1.2 Al s t4 Getting Started Guide
4.1.3 e31x 4.1.4 Ettus E31x Getting Started Guide
4.1.5 matchstiq_z1 4.1.6 Match s tiq Z1 Getting Started Guide
adrv9361
A nalog Devices A DRV9361- Z7035 Getting Started Guide
alst4, alst4x
Al s t4 Getting Started Guide
e31x
Ettus E31x Getting Started Guide
matchstiq_z1
Match s tiq Z1 Getting Started Guide
microzed_10_cc
microzed_20_cc
Avnet MicroZed 7Z010 Getting Started Guide
Avnet MicroZed 7Z020 Getting Started Guide
ml605
ML605 Getting Started Guide
picoevb
RHS Research P icoEVB Getting Started Guide
picozed_10_cc
picozed_15_cc
picozed_20_cc
picozed_30_cc
A vnet P icoZed 7Z010 Getting Started Guide
Avnet P icoZed 7Z01 5 Getting Started Guide
Avnet PicoZed 7Z0 2 0 Getting Started Guide
Avnet PicoZed 7Z0 3 0 Getting Started Guide
plutosdr
PlutoSDR Getting Started Guide
x310
Ettus X310 Getting Started Guide
zcu102
Xilinx ZCU102 Getting Started Guide
zcu111
Xilinx ZCU111 Getting Started Guide
zed, zed_ise
Zed B oard Getting Started Guide
OpenCPI Installation Guide Page 30 of 107

5 Enabling OpenCPI Development for Embedded Systems
OpenCPI uses the term embedded systems for processors and systems that will
execute OpenCPI components and applications, but are not used to build or compile
OpenCPI or components (i.e. not development hosts). The primary example is the
Avnet (Digilent) ZedBoard™, which has a Xilinx Zynq SoC chip that contains two ARM
CPU cores for software and an FPGA section for “gateware”. Embedded systems
always have a processor to run the OpenCPI software runtime and usually have
FPGAs, too.
An OpenCPI system is a collection of processing elements that can be used together.
We call each available processor and its surrounding directly-connected hardware a
platform. Platforms come in different types; the primary ones are software platforms
which usually run C++ and Linux, and FPGA platforms which run VHDL or Verilog code.
For the purposes of installation of OpenOPI for an embedded system, each platform is
considered separately. If a system is supported by OpenCPI, it means that each of its
platforms is supported by OpenCPI. Once you know which platforms are present in the
system, you perform the installation tasks related to each platform, and then any final
installation tasks for the system as a whole (which is usually minor).
To use the ZedBoard as an example, its dual-ARM-core CPU can run many flavors and
versions of Linux, and each is considered a different software platform. So when we
set up a ZedBoard, we first select one of several possible software platforms. The
default one is called xilinx19_2_aarch32 and is based on the Xilinx distribution of
Linux released in February 2019. Similarly, an FPGA platform might have different tool
sets and versions that are used to build executable binaries for it, and each would be
considered an FPGA platform. The default FPGA platform for the ZedBoard is called
zed, and is defined to use the Xilinx Vivado tool set for building binaries for it. There is
an alternative FPGA platform for the ZedBoard, called zed_ise, which is defined to use
the older Xilinx ISE tool set.
So, installation for the ZedBoard system consists of steps for the software platform (e.g.
xilinx19_2_aarch32), steps for the FPGA platform (e.g. zed_ise), and finally steps
for the ZedBoard system as a whole.
OpenCPI Installation Guide Page 32 of 107

5.1 Installation Steps for Platforms
The support for every OpenCPI platform is contained in an OpenCPI project. The
support for some OpenCPI platforms, like the zcu104, is contained in the built-in
projects (in this case, ocpi.platform). The support for other OpenCPI platforms, like
the e31x, is contained in projects called OSPs (OpenCPI System support Projects; in
this case, ocpi.osp.3xx). The Table of Supported Platforms lists the project that
each platform requires.
In a project, a platform resides in its own directory <name> (which is usually the
lowercase version of the name used by the platform’s vendor) under a platforms/
subdirectory in the project’s hdl/ or rcc/ directory. For example:
../projects/platform/hdl/platforms/zcu104
../projects/core/rcc/platforms/xilinx19_2_aarch32
../projects/osps/ocpi.osp.e3xx/hdl/platforms/e31x
The README file that is usually supplied in a platform’s directory provides more specific
information about it.
Installing (enabling development for) OpenCPI platforms requires three steps:
1. Manually install the required tools if they are needed (as stated in the Table of
Supported Platforms) and have not been installed already for another platform.
Instructions for installing these required tools are found in the section Installing
Third-party/Vendor Tools.
2. Download the OpenCPI project repository (if not built-in) that contains support for
the platform (per the Table of Supported Platforms) and which has not already
been downloaded for another platform.
3. Build the required platform support from the built-in projects and the
platform's OSP (if any) for the platform.
Step 1 can enable cross compilers for software platforms, or simulators and synthesis
tools for FPGA platforms.
Steps 2 and 3 are performed by running the OpenCPI command:
ocpiadmin install platform <platform> [<options>]
This command downloads the OSP (use command options to specify its location; see
the ocpiadmin (1) man page for details) if the platform support isn’t in the built-in
projects and builds the platform. This command must be used on both software and
FPGA platforms.
The command places downloaded projects in the projects/osps subdirectory of the
OpenCPI installation directory. For hardware (FPGA) platforms, assembly builds are
suppressed except for a single test assembly to verify the installation and any
assemblies in the OSP itself.
OpenCPI Installation Guide Page 33 of 107
5.2 Installation Steps for Systems after their Platforms are Installed
There are three modes of operation for OpenCPI on embedded systems and the setup
tasks depend on which modes will be used. The modes are:
Server Mode: the embedded system acts as an SSH server which does not rely on
any local/embedded media or NFS client/server configuration. It is loaded by
the development system pushing files to it via SSH which are only stored in
non-volatile memory. Applications are launched on the development hosts, and
the embedded system acts as a server for execution of OpenCPI components
on its platforms (“containers” at runtime).
Network Mode: a development system hosts the OpenCPI installation as an NFS
server to the embedded system as an NFS client. This configuration provides
quick and dynamic access to all of OpenCPI, and presumably any applications,
components and bitstreams. Changes and rebuilds on the development host
are instantly visible to the embedded system with no need to change or reload
files on the embedded system (e.g. SD card). The downside is the complexity
of setting up NFS servers, mounts, firewalls etc.
Standalone Mode: the embedded system relies totally on the OpenCPI files on the
media embedded or plugged into it, but has no reliance on the network. Any
changes during development must be copied to the media in the embedded
system, which then usually requires rebooting.
Server mode requires no OpenCPI files on non-volatile media, and no NFS software or
configurations, but does depend on the presence of a network connection to a
development system to load and launch applications. The bootable SD card in the
system (the Linux kernel that boots) must provide an SSH server and nothing else.
Some embedded systems still require an OpenCPI-enhanced boot environment on the
SD card if the default boot configuration does not provide for SSH networking. This
mode is best and simplest for automated testing of applications and components on the
embedded system in a lab environment.
Network mode requires a network connection, the development host configured as an
NFS server (with firewalls configured appropriately), and the embedded system
configured as an NFS client, with OpenCPI loaded on the its non-volatile media.
Standalone mode requires no network connection and relies on OpenCPI files being
loaded onto non-volatile media (e.g. the bootable SD card). Thus the media must be
loaded onto the development system and then physically transferred to (plugged into)
the embedded system. No NFS software or configurations are required, but any
changes involve plugging and unplugging the non-volatile media, updating it on the
development host, and then physically transferring onto the embedded system.
All three modes have implications on how SD cards are prepared by OpenCPI for the
embedded systems. In some cases, the SD card that comes from the manufacturer of
the embedded system is usable unmodified, for server mode. The OpenCPI tools that
create SD cards currently create contents that support all modes.
OpenCPI Installation Guide Page 34 of 107

5.2.1 Preparing the SD Card Contents
The SD card contents for OpenCPI is a combination of files required by the software
platform and the hardware platform. Essentially the software platform of the system
establishes a baseline of SD card content, and then the SD card is further specialized
for the hardware platform. For example, the xilinx19_2_aarch_32 software
platform (Linux kernel, compiler, libraries), is usable for the Avnet ZedBoard system and
the Ettus E310 system. So when that platform is used for either of these systems, the
SD card contents are first established by that platform. Then the contents are further
specialized for the actual hardware platform (zed, e31x).
A single command is used to create the SD card contents for a given embedded
system, and the command is supplied with the two platforms that make up the system.
ocpiadmin deploy platform <rcc-platform> <hdl-platform>
The command is run after the dependencies for both OpenCPI platforms are installed
and the OpenCPI platforms are installed and built with the ocpiadmin install
platform <platform> command. It results in a directory
cdk/<hdl-platform>/sdcard-<rcc-platform>, whose contents can be copied
to an SD card. In the example of the Ettus E310, a system using the
xilinx19_2_aarch32 software platform and the e31x hardware platform, the SD
card contents would be in the directory:
cdk/e31x/sdcard-xilinx19_2_aarch32
In general, when creating a new SD card for an embedded system, you start with the
card that came from the manufacturer, make a raw copy of it, mount it, remove files, and
perform the copy operation below. This preserves whatever formatting and partitioning
that is correct for the system. Sometimes it is necessary to format the card in some way
specific to that system (e.g. if the cards are not the same size). Any variations of this
method will be explained in the documentation or README or Getting Started Guide for
that system. Making a raw copy is mentioned in the section on preparing a
development host for reading and writing SD cards here.
The SD card contents created by OpenCPI using the ocpiadmin deploy platform
command above includes the files necessary for any of the modes described above
(network, standalone, server). Standalone mode requires the most files.
Some customization of setup scripts on the SD card may be required for standalone or
network modes, as described in the SD Card Startup Scripts section.
5.2.2 Writing the SD Card
To write the prepared contents onto the physical SD card, it must be mounted as a file
system on the development system. Some SD cards are partitioned into multiple
partitions, but the prepared OpenCPI SD card contents are intended to be copied to the
boot partition. Thus you must determine the mount point of the boot partition (or only
partition) of the SD card. Use the df -h command to find where the SD card (in
particular, its boot partition) is mounted. A common mount point is /media/BOOT.
OpenCPI Installation Guide Page 35 of 107

If the boot partition of the SD card is not mounted (in unusual cases where it is not
automatically mounted upon insertion), you must mount it. See the SD Card
Reader/Writer section for this.
To actually write the SD card, you would do, e.g. with the SD card mounted as
/media/xyz:
% rm -r -f /media/xyz/*
% cp -RLp cdk/e31x/sdcard-xilinx19_2_aarch32/* /media/xyz
% umount /media/xyz
At this point, the SD card can be removed and plugged into the embedded system
(while powered off).
5.2.3 SD Card OpenCPI Startup Script Setup
For network and standalone modes, a startup script is used to configure the
environment of the embedded system. The OpenCPI framework provides a default
script for each mode. The default scripts are to be copied and modified per the user's
requirements. The use of <mount> below indicates where the boot partition of the SD
card is mounted on the development system.
Note: Server mode does not require an OpenCPI startup script.
5.2.3.1 Network Mode Script Setup
1. Make a copy of the default script for editing/customizing.
$ cp /run/media/<mount>/opencpi/default_mynetsetup.sh \
/run/media/<mount>/opencpi/mynetsetup.sh
2. Edit the copy in mynetsetup.sh
In mynetsetup.sh, uncomment the following lines which are necessary for
mounting the core and assets built-in projects. Note the $1 will be filled in with
the network address of the development host.
mkdir -p /mnt/ocpi_core
mount -t nfs -o udp,nolock,soft,intr \
$1:/home/user/ocpi_projects/core /mnt/ocpi_core
mkdir -p /mnt/ocpi_assets
mount -t nfs -o udp,nolock,soft,intr \
$1:/home/user/ocpi_projects/assets /mnt/ocpi_assets
3. Change the pathnames /home/user/ocpi_projects/core and
/home/user/ocpi_projects/assets to reflect the paths to the core
and assets projects on the development host, e.g. resulting in:
mkdir -p /mnt/ocpi_core
mount -t nfs -o udp,nolock,soft,intr \
$1:/home/johndoe/opencpi/projects/core /mnt/ocpi_core
mkdir -p /mnt/ocpi_assets
mount -t nfs -o udp,nolock,soft,intr \
$1:/home/johndoe/opencpi/projects/assets /mnt/ocpi_assets
OpenCPI Installation Guide Page 36 of 107

5.2.3.2 Standalone Mode Script Setup
In this mode, all OpenCPI artifacts that are required to run any application on the
system are copied onto the SD card. Once the artifacts have been created, they must
be copied to the SD card. In general, any required .so (RCC workers), .bit.gz (HDL
assemblies), and application XMLs or executables must be copied to the SD card.
1. Make a copy of the default script for editing
cp /run/media/<mount>/opencpi/default_mysetup.sh \
/run/media/<mount>/opencpi/mysetup.sh
2. Unlike network mode, there are no required modifications to this script, but
some customizations could be made.
3. Copy any additional artifacts to SD card's opencpi/artifacts/ directory.
5.2.3.3 System Time Setup
If Linux system time on the embedded system is not required to be accurate, this step
may be skipped. For either network or standalone mode, the following settings in
my[net]setup.sh may require modification:
Identify the system that is to be used as a time server, where the default is
time.nist.gov and is set in opencpi/ntp.conf on the SD card. A valid time
server must support NTP.
Identify the current timezone description, where the default is
EST5EDT,M3.2.0,M11.1.0. Change this if required for the local timezone. See
man tzset on the development host for more information.
If a time server is not required, or cannot connect to a time server, the user is required
to manually set the time at system start-up. Use the date command on the embedded
system to manually set the Linux system time. Use date --help on the embedded
system to display command usage information. Use man date on the development
host if additional information is needed.
5.2.4 Establishing a Serial Console Connection
The section Preparing the Development Host for Serial Console describes how to set up
serial consoles from the development host. This step depends on two pieces of
information about the embedded system: the baud rate of the serial port and the udev
rules file located at:
$OCPI_CDK_DIR/<pf>/udev_rules/*.rules
This file is created during installation of the hardware platform.
5.2.5 Configuring the Runtime Environment on the Embedded System
This section shows how to verify the runtime environment before running any
applications.
OpenCPI Installation Guide Page 37 of 107

Unless in a standalone mode without a network connection, make sure the network
connection (e.g. Ethernet cable and/or USB dongle) is connected to a network
configured for DHCP for network connectivity.
Ensure there is a console serial cable (typically a micro-USB to USB-A cable)
connected between the embedded system's serial port and development host.
Apply power to the embedded system.
Use a serial terminal application to establish a serial connection. For example, to use
the screen serial terminal application, use this command on the development host:
sudo screen /dev/ttyUSB0 115200
This command assumes the USB connection is on /dev/ttyUSB0 and the baud rate is
115200; both these parameters can be different. If there is a udev rules file installed
for the embedded system, the tty device name may be the actual name of the
embedded system with a _0 suffix and sudo may not be required.
After successfully booting the Linux OS on the embedded system, login to the system.
Commonly-used (default) credentials are "root" for the user name and "root" for the
password, but that depends on the embedded system.
5.2.5.1 Server Mode
After a successful login, we now establish the embedded system as an OpenCPI
container server to permit applications to execute on the system over SSH when run
from the development host. This setup takes advantage of the OpenCPI remote
container feature described in detail in the OpenCPI Application Development Guide.
To perform the setup:
Use the OpenCPI environment variable OCPI_SERVER_ADDRESSES to set the
network address (XX.XX.XX.XX) and optionally the TCP port of the embedded
system for subsequent commands.
Use the ocpiremote (1) command to load the OpenCPI server software onto the
embedded system and start the server as follows:
For the ocpiremote load operation, use the --rcc-platform and --hdl-
platform options as necessary to specify the embedded system's RCC and HDL
platforms; the default RCC platform used by the command is
xilinx19_2_aarch32 and the default HDL platform is zed. Use the
--password option as necessary to specify the server's login password; the
default password used by the command is root.
For the ocpiremote start operation, use the –-bitstream option to load a
test OpenCPI bitstream over whatever has already been loaded.
Here is a sequence of steps done on a development host to set up an OpenCPI
container server on an Ettus Research E310 USRP embedded system. In this
example, the TCP port being used at the server is 12345, and the explicitly specified
OpenCPI Installation Guide Page 38 of 107
network address of the server is 10.0.0.86. The RCC platform used for the system is
xilinx19_2_aarch32, so it does not need to be specified. The password used is
root, so it, too, does not need to be specified.
# set the server address and port for both ocpiremote and ocpirun
export OCPI_SERVER_ADDRESSES=10.0.0.86:12345
ocpiremote load --hdl-platform e31x
ocpiremote start --bitstream
After loading and starting the server, use the ocpiremote status command to make
sure it's running. For the example above, use:
ocpiremote status
You should see output similar to the following:
Executing remote configuration command: status
Server is running with port: 12345 and pid: 26224
At this point, the embedded system is ready to execute applications run from the
development host.
5.2.5.2 Network Mode
After a successful login, we now establish the OpenCPI environment for this login shell
as well as subsequent SSH logins via the network.
Each time the system is booted, the OpenCPI environment must be established. By
sourcing the mynetsetup.sh script, the embedded system's environment is
configured for OpenCPI, and NFS directories are mounted for network mode.
2
The user
must provide two arguments to the script: 1) the network address (XX.XX.XX.XX) of
the development system and 2) the pathname (/path/to/share) to mount on the
development system to the script as its only argument:
source /mnt/card/opencpi/mynetsetup.sh XX.XX.XX.XX /path/to/share
where XX.XX.XX.XX is the IP address of the NFS host (i.e. the development host, e.g.
192.168.1.10). A successful run should output the following:
An IP address was detected.
Setting the time from time server: time.nist.gov
My IP address is: XX.XX.XX.XX, and my hostname is: zynq
Running login script. OCPI_CDK_DIR is now /mnt/net/cdk.
Executing /home/root/.profile
No reserved DMA memory found on the linux boot command line.
The mdev config has no OpenCPI rules. We will add them to /etc/mdev.conf
NET: Registered protocol family 12
Driver loaded successfully.
OpenCPI ready for zynq.
Discovering available containers...
Available containers:
# Model Platform OS OS-Version Arch Name
2 This script calls the zynq_setup.sh script, which should not be modifiable by the
user.
OpenCPI Installation Guide Page 39 of 107

0 hdl e31x PL:0
1 rcc xilinx19_2_aarch32 linux x19_2 arm rcc0
The platforms (e31x and xilinx19_2_aarch32 in this example) will correspond to
the platforms of the actual embedded system.
Note: If the output includes:
Attempting to set the time from time server
Alarm clock
it indicates that ntp was unable to set time using servers in ntp.conf. For more
information, see the section System Time Setup.
5.2.5.3 Standalone Mode
WARNING: Applications (including XML-only ones) fail if there is not an IP address
assigned to the platform, even when in standalone mode. When the Ethernet port is not
connected to a network configured with DHCP, a temporary IP address must be set, e.g.
ifconfig eth0 192.168.244.244
Each time the system is booted, the OpenCPI environment must be set up. By sourcing
the mysetup.sh script, the embedded system's environment is configured for
OpenCPI. There are no arguments for this script.
source /mnt/card/opencpi/mysetup.sh
A successful run should output the following:
Attempting to set the time from time server: time.nist.gov
Setting the time from time server: time.nist.gov
Running login script. OCPI_CDK_DIR is now /mnt/card/opencpi.
Executing /home/root/.profile
No reserved DMA memory found on the linux boot command line.
The mdev config has no OpenCPI rules. We will add them to /etc/mdev.conf
NET: Registered protocol family 12
Driver loaded successfully.
OpenCPI ready for zynq.
Discovering available containers...
Available containers:
# Model Platform OS OS-Version Arch Name
0 hdl e31x PL:0
1 rcc xilinx19_2_aarch32 linux x19_2 arm rcc0
The platforms (e31x and xilinx19_2_aarch32) in this example will correspond to
the platforms of the actual embedded system.
5.2.6 Running a Test Application
This section provides confirmation of a successful installation by running an application
on the embedded system.
5.2.6.1 Running an Application in Server Mode
Once the server network address and port have been established and the OpenCPI
server software has been loaded and started on the target embedded system, no further
OpenCPI Installation Guide Page 40 of 107

setup is required. Use the ocpirun(1) command to run the test application as
follows:
ocpirun -v -t 1 -d -m bias=hdl bias.xml
The output should be similar to:
Available containers are: 0: PL:0 [model: hdl os: platform: e31x], 1:
rcc0 [model: rcc os: linux platform: xilinx19_2_aarch32]
Actual deployment is:
Instance 0 file_read (spec ocpi.core.file_read) on rcc container 1:
rcc0, using file_read in
/mnt/ocpi_core/artifacts/ocpi.core.file_read.rcc.0.xilinx19_2_aarch32.so
dated Fri Jan 22 18:18:26 2021
Instance 1 bias (spec ocpi.core.bias) on hdl container 0: PL:0, using
bias_vhdl/a/bias_vhdl in
/mnt/ocpi_assets/artifacts/ocpi.assets.testbias_e31x_base.hdl.0.e31x.gz
dated Mon Jan 25 11:59:53 2021
Instance 2 file_write (spec ocpi.core.file_write) on rcc container 1:
rcc0, using file_write in
/mnt/ocpi_core/artifacts/ocpi.core.file_write.rcc.0.xilinx19_2_aarch32.so
dated Fri Jan 22 18:18:31 2021
Application XML parsed and deployments (containers and artifacts) chosen
Application established: containers, workers, connections all created
Dump of all initial property values:
Property 0: file_read.fileName = "test.input" (cached)
Property 1: file_read.messagesInFile = "false" (cached)
Property 2: file_read.opcode = "0" (cached)
Property 3: file_read.messageSize = "16"
Property 4: file_read.granularity = "4" (cached)
Property 5: file_read.repeat = "<unreadable>"
Property 6: file_read.bytesRead = "0"
Property 7: file_read.messagesWritten = "0"
Property 8: file_read.suppressEOF = "false"
Property 9: file_read.badMessage = "false"
Property 10: file_read.ocpi_debug = "false" (parameter)
Property 11: file_read.ocpi_endian = "little" (parameter)
Property 12: bias.biasValue = "16909060" (cached)
Property 13: bias.ocpi_debug = "false" (parameter)
Property 14: bias.ocpi_endian = "little" (parameter)
Property 15: bias.test64 = "0"
Property 16: file_write.fileName = "test.output" (cached)
Property 17: file_write.messagesInFile = "false" (cached)
Property 18: file_write.bytesWritten = "0"
Property 19: file_write.messagesWritten = "0"
Property 20: file_write.stopOnEOF = "true" (cached)
Property 21: file_write.ocpi_debug = "false" (parameter)
Property 22: file_write.ocpi_endian = "little" (parameter)
Application started/running
Waiting up to 1 seconds for application to finish
Application finished
Dump of all final property values:
Property 3: file_read.messageSize = "16"
Property 5: file_read.repeat = "<unreadable>"
Property 6: file_read.bytesRead = "4000"
Property 7: file_read.messagesWritten = "251"
Property 8: file_read.suppressEOF = "false"
OpenCPI Installation Guide Page 41 of 107

Property 9: file_read.badMessage = "false"
Property 15: bias.test64 = "0"
Property 18: file_write.bytesWritten = "4000"
Property 19: file_write.messagesWritten = "250"
Run the following command to view the input:
hexdump test.input | less
The output should look like the following:
0000000 0000 0000 0001 0000 0002 0000 0003 0000
0000010 0004 0000 0005 0000 0006 0000 0007 0000
0000020 0008 0000 0009 0000 000a 0000 000b 0000
0000030 000c 0000 000d 0000 000e 0000 000f 0000
...
0000130 004c 0000 004d 0000 004e 0000 004f 0000
0000140 0050 0000 0051 0000 0052 0000 0053 0000
0000150 0054 0000 0055 0000 0056 0000 0057 0000
0000160 0058 0000 0059 0000 005a 0000 005b 0000
Run the following command to view the output:
hexdump test.output | less
The output should look like the following:
0000000 0304 0102 0305 0102 0306 0102 0307 0102
0000010 0308 0102 0309 0102 030a 0102 030b 0102
0000020 030c 0102 030d 0102 030e 0102 030f 0102
0000030 0310 0102 0311 0102 0312 0102 0313 0102
...
0000130 0350 0102 0351 0102 0352 0102 0353 0102
0000140 0354 0102 0355 0102 0356 0102 0357 0102
0000150 0358 0102 0359 0102 035a 0102 035b 0102
0000160 035c 0102 035d 0102 035e 0102 035f 0102
5.2.6.2 Running an Application in Network Mode
The default setup script sets the OCPI_LIBRARY_PATH variable to include the RCC
artifacts that are required to execute the application, but it must be updated to include to
the assembly bitstream that was built on the development host. After running the
mynetsetup.sh script, run the following commands to update the
OCPI_LIBRARY_PATH variable and execute the application:
export \
OCPI_LIBRARY_PATH=/mnt/ocpi_assets/artifacts:/mnt/ocpi_core/artifacts
cd /mnt/ocpi_assets/applications
ocpirun -v -t 1 -d -m bias=hdl bias.xml
The viewing commands and output should be similar to the output shown above in
Running in Server Mode .
OpenCPI Installation Guide Page 42 of 107

5.2.6.3 Running an Application in Standalone Mode
The default setup script sets the OCPI_LIBRARY_PATH variable to include the artifacts
that are required to execute the application. Specifically, all three of the artifacts that
are located on the SD card are available at:
/mnt/card/opencpi/<rcc-platform>/artifacts
After sourcing mysetup.sh, run the application with these commands:
cd /mnt/card/opencpi/xml
ocpirun -v -t 1 -d -m bias=hdl bias.xml
The viewing commands and output should be similar to the output shown above in
Running in Server Mode .
5.2.7 Updating Files on the Embedded System at Runtime
Currently OpenCPI requires SSH access to embedded systems, thus the easiest way to
update files on the embedded system is to use the scp command on the development
host. When the embedded system is running in standalone mode (no network mounts),
the applications or artifacts can be updated this way after being edited or rebuilt on the
development host.
OpenCPI Installation Guide Page 43 of 107
6 Installing Third-party/Vendor Tools
OpenCPI uses a collection of third-party tools to enable it to target embedded software
and FPGA/HDL platforms. Each platform supported by OpenCPI depends on one or
more of these third-party tools. The Table of Supported Platforms in this guide lists the
platforms and their tool dependencies. This section describes how to install the tools
that are required for the particular platform(s) you plan to use. Installing these tools
enables the platform to be built, as shown in the figure that depicts the installation
sequence for each platform in an embedded system.
As of the current release, all the tools described in this section require manual
installation steps using browsers and vendor-provided installation GUIs. This means
that the development system must support typical GUI tools using X-Windows, and it is
assumed that the FireFox browser is used for any of the web-based steps.
Also, some of these tools have prerequisite software packages that are automatically
installed when OpenCPI is installed per the Install, Build and Test OpenCPI section.
Thus these instructions for third-party tools assume that the basic OpenCPI installation
for the development host is already done.
OpenCPI Installation Guide Page 44 of 107

6.1 Installing Xilinx Tools
Here is the recommended procedure for installing Xilinx tools. Most of these steps
require internet access and a Xilinx web site account:
1. Create a directory to act as a common top-level directory for all the Xilinx
tools to be installed.
2. Install the Xilinx Vivado WebPACK. This installation is explicitly for the most
recent version of the tool supported by OpenCPI. After you perform this step,
you will have:
The Xilinx FPGA simulator xsim, which allows you to follow the OpenCPI tutorials
and learn about using OpenCPI for heterogeneous development on FPGAs
without needing any FPGA hardware.
The Xilinx unified installer “downloader", which you can use to download installers
for licensed versions of all Xilinx parts if needed (see step 4).
The current Xilinx SDK, which you can use if your target Xilinx-related software
platform(s) require it. See step 3).
3. For each Xilinx-related software platform you plan to use, install the Xilinx
tools required for that platform. These are:
Xilinx SDK for cross-compilation on embedded platforms
Xilinx Linux binary release and Xilinx Linux kernel and U-boot source code for
preparing bootable SD cards for Zynq-7000/UltraScale platforms
These tools are specific to both the SDK version and the ARM CPU architecture
used by the platform. Install the versions that correspond to your target software
platform(s), as listed in the “Dependencies required...” column of the Table of
Supported Platforms.
4. If Xilinx Vivado WebPACK doesn’t support your Xilinx parts, install the Xilinx
Vivado licensed tools that do support them. You will need to get your licenses
from Xilinx and you should uninstall/remove the Vivado WebPACK
installation first.
5. If Vivado does not support your Xilinx parts because they are too old (for
example, the Virtex-6 FPGA), install the ISE Design Suite 14.7 tool set.
After you have finished this procedure:
All the Xilinx tools required for your particular platform(s) are installed and are
located in one place: the directory you created in step 1.
You can run the ocpiadmin tool to install a Xilinx-based platform without needing
network access. Be sure the account that runs the tool has write permission for
any directories created under the top-level Xilinx installation directory.
The remainder of this section provides instructions for performing each step.
OpenCPI Installation Guide Page 45 of 107

6.1.1 Xilinx Tools Installation Directory
Before you begin to install the Xilinx tools, decide where you want to install them. It is
recommended that you install all the Xilinx tools in the same top-level directory to keep
them all in one place. The Xilinx tool sets require a very large amount of disk space for
installation (for example, WebPACK installation requires about 36GB) and the Xilinx
installer needs write access to the directory you choose. You do one of three
alternatives, with the first being recommended:
1. Use the default directory offered by the Xilinx installer. The default
directory is /tools/Xilinx for Vivado 2019.2 or later and
/opt/Xilinx for versions older than 2019.2. Create this directory
outside of the installer so that the installer doesn’t need to run with root or sudo
permission. For example:
sudo mkdir /tools/Xilinx
sudo chmod 777 /tools/Xilinx
2. Use a different directory from the default – for example, ~/MyXilinxTools – and
then create a symbolic link from the default directory to that directory. E.g.:
sudo ln -s ~/MyXilinxTools /tools/Xilinx
3. Use a different directory from the default and then set the OCPI_XILINX_DIR
environment variable to that directory by editing/uncommenting the
OCPI_XILINX_DIR line in the user-env.sh file. E.g. if you will install the tools
under ~/MyXilinxTools, the line in user-env.sh should be:
export OCPI_XILINX_DIR=~/MyXilinxTools
Once you’ve set up your top-level Xilinx tools installation directory, you can proceed to
install the tools.
6.1.2 Xilinx Vivado WebPACK for Simulation and for Small, Recent FPGA Parts
The Xilinx Vivado tool set is offered in several different variants; of these, the Vivado
Design Suite HL WebPACK™ Edition is free and is the easiest one to install because it
doesn’t require a license. Unfortunately, it is still a large and slow installation.
In addition to simulation, the WebPACK Edition supports compilation for a limited set of
Xilinx hardware FPGA parts; however, the Xilinx parts it does support are those found in
most small systems, including the Avnet (Digilent) ZedBoard, the Epiq Matchstiq-Z1 and
the Ettus E310. Consult this link for vendor information on supported parts for
WebPACK Edition. If you need to use OpenCPI platforms with Xilinx parts that
WebPACK Edition does not support, you must buy licenses and perform a licensed
installation of at least the Vivado Design Edition.
The rest of this section describes how to install Vivado WebPACK with vendor defaults
on a CentOS7 development host. This is the basic installation required to get the xsim
simulator up and running to support FPGA development without FPGA hardware. It is
correct for the Vivado 2019.2 release.
OpenCPI Installation Guide Page 46 of 107

6.1.2.1 Download the Xilinx Unified Installer Binary
In a browser on your development host, go to
https://www.xilinx.com/support/download.html.
In Version on the left, click on Vivado Archive and then click 2019.2.
Scroll down to the downloads menu region Vivado Design Suite – HLx Editions –
2019.2 and then select Xilinx Unified Installer 2019.2: Linux Self Extracting Web
Installer.
OpenCPI Installation Guide Page 47 of 107

In the login dialog, enter your email address and password or click Create Account to
create one.
Fill out the required information in the Xilinx Download Center Name and Address
Verification page and then click Download.
In the dialog that pops up, click Save File.
The file is saved to the ~/Downloads directory on your CentOS7 development host.
OpenCPI Installation Guide Page 48 of 107

6.1.2.2 Run the Unified Installer to Download the Vitis/Vivado Design Suite Installer
In a terminal window on your CentOS7 development host, navigate to the ~/Downloads
directory. Run the unified installer binary with the bash command. For example:
bash Xilinx_Unified_2019.2_1106_2127_Lin64.bin
The installer starts and displays a dialog informing you that there is a newer version of
the software available. Click Continue to close the dialog, then click Next.
In the Select Install Type dialog:
Select Download Full Image (install separately).
Replace the default directory provided in the dialog with a temporary directory of
your choice that has sufficient disk space to accommodate the installation files and
sufficient permissions to permit the binary installer to write to this location. We will
refer to this directory as the downloads directory. It is temporary and can be
removed at the end of the installation. It is not the final installation location.
Do not choose to create a ZIP archive.
OpenCPI Installation Guide Page 49 of 107

Click Next.
OpenCPI Installation Guide Page 50 of 107

In the Select Product to Install dialog, Vitis is pre-selected. This product provides
everything we need, including the WebPACK edition of Vivado and the current SDK (we
do not want the Vivado package). Leave this selection as Vitis and then click Next.
The unified installer binary displays a Download Summary that allows you to verify the
directory where you’re downloading, the size and disk space required (27.24GB) and
the platform (Linux). Click Download.
OpenCPI Installation Guide Page 51 of 107

The Download Center displays an Installation Progress dialog.
When the download completes, click OK in the pop-up dialog to exit. (A notification that
the unified installer binary has completed also pops up.)
OpenCPI Installation Guide Page 52 of 107

Now you have downloaded the main Vitis/Vivado Design Suite installer (called Vitis IDE
in some windows) into the downloads directory, which you can use to install the Vivado
WebPACK Edition and the current SDK. This installer can also be used later to install
other Xilinx tools, including licensed versions for all Xilinx parts. Don't delete it until all
such installations are done.
Note that the initial “unified installer” that you downloaded was really just used as a
“downloading tool”, to download the (big) Vitis/Vivado installer, which, when it runs, also
displays the title “unified installer”. So at this point you have downloaded a small
“unified installer” download tool, and run it to download the big Vitis/Vivado “unified
installer”.
6.1.2.3 Run the Vitis/Vivado Design Suite Installer
In a terminal/shell window, navigate to the directory where you downloaded the
installation files (the downloads directory) and then run the following command:
./xsetup
The installer starts and briefly shows a window titled “Vitis IDE”, and then a new window
comes up with the title “Xilinx Unified Installer”, which is the same title as the initial
“downloader” program used above. Be aware that it can take as much as 20 minutes
for you to see the first dialog.
OpenCPI Installation Guide Page 53 of 107

The first dialog is the license terms. Agree with the license terms.
OpenCPI Installation Guide Page 54 of 107

In the Select Product to Install dialog, Vitis is already selected. This is the product we
want to install (we do not want the Vivado option), so leave this selection as it is and
click Next.
OpenCPI Installation Guide Page 55 of 107

In the Select Edition to Install dialog, Vitis Unified Software Platform is already
selected. Leave this selection as it is and click Next.
OpenCPI Installation Guide Page 56 of 107

In the Vitis Unified Software Platform dialog, leave everything as it is and then click
Next to accept the selected defaults.
OpenCPI Installation Guide Page 57 of 107

In the Select Destination Directory dialog:
Specify the Xilinx tools directory you created before you started the Xilinx tools
installation process. Ensure you have read/write permissions and that the
destination has sufficient disk space for the installed software. If you have chosen
to use the default directory, make sure that your choice is the same as what’s
specified in this dialog.
Uncheck Create program group entries.
Uncheck Create desktop shortcuts.
Click Next.
The Installation Summary dialog appears. Click Install to start the installation.
When the download completes, click OK in the pop-up dialog to exit. You have now
installed the Vivado WebPACK Edition tools and the Xilinx xsim simulator. This
installation procedure has also automatically installed the current SDK for cross
compiling various Xilinx SoC platforms.
There many advanced installation scenarios for Xilinx Vivado. This one is sufficient for
running xsim, and also for targeting OpenCPI platforms with small Xilinx FPGA parts.
OpenCPI Installation Guide Page 58 of 107

6.1.2.4 Prepare and Build the Simulator as an OpenCPI Platform
To complete the installation of xsim for OpenCPI so that you have a base for learning
about OpenCPI development on FPGAs without requiring FPGA hardware, you must
run the following ocpiadmin command:
ocpiadmin install platform xsim
This command builds the OpenCPI built-in projects for using xsim. It may take 10-15
minutes to complete.
6.1.3 Xilinx Current SDK Tools for Cross-compilation for Newer Xilinx-based Software
Platforms
The current SDK for cross compiling various Xilinx SoC platforms is part of the
Vitis/Vivado Design Suite and is automatically installed when performing the Xilinx
Vivado WebPACK installation. No additional installation steps are necessary.
6.1.4 Xilinx Binary Releases for Zynq-7000 and Zynq-UltraScale Systems
To prepare bootable SD cards for Xilinx Zynq-7000 and Zynq-UltraScale software
platforms, the Xilinx-provided binary Linux release packages are required. Recent
Xilinx releases require these downloads to be done using a browser to confirm the
user's account, physical location and license acceptance. These releases are called (by
Xilinx) “Linux Prebuilt Images”, and contain a set of built, binary assets for booting
Linux.
If a platform mentions that it requires a “Xilinx Binary Release” in the “Dependencies
required..” column in the Table of Supported Platforms, then the following download
procedure should be performed. We will use the xilinx19_2_aarch32 platform as
an example.
The “Dependencies required” column for the xilinx19_2_aarch32 platform mentions
that it requires “Xilinx Binary Zynq Release 2019.2”. So the Xilinx release identifier is
2019.2. Here are the steps to make this binary release available to OpenCPI:
1. If there is not already one existing, create a directory under the top-level
Xilinx tools installation directory you created before starting the Xilinx tools
installation process (usually /tools/Xilinx or /opt/Xilinx), called
ZynqReleases/<xilinx-release>. E.g. in this example:
mkdir -p /tools/Xilinx/ZynqReleases/2019.2
2. Go to the Xilinx Wiki page at wiki.xilinx.com. Select the Linux Prebuilt
Images page and then select the particular release, e.g. 2019.2 Release.
On this page for the release, navigate/scroll to the Downloads section,
which has a list of downloadable files for various hardware platforms.
3. Download all these files into the directory you have created above. You may
avoid files that correspond to systems you will never use, but it is usually
best to download them all at once.
OpenCPI Installation Guide Page 59 of 107

Once these steps are taken, the binary release is available to OpenCPI tools; in
particular, it will be used when the ocpiadmin install platform <platform>
command is run for the software platform after the Xilinx tools installation procedure is
complete. Note that the ZynqReleases/<xilinx-release>/ directory must have
write permission for the account that runs this ocpiadmin command.
6.1.5 Xilinx Linux Kernel and U-Boot Source Code Repositories
To prepare bootable SD cards for Xilinx Zynq-7000 and Zynq-UltraScale software
platforms, the Xilinx source code repositories for the Linux kernel and U-boot are
required. Among other things, these repositories allow the OpenCPI loadable kernel
module to be built against the correct Linux kernel — the one that is in the binary
release mentioned in the previous section.
These Xilinx repositories reside on github.com and are easily downloaded (“cloned”
in this case). Since these repositories are fully open source software, no browser-based
licensing dialog is required. If a platform mentions that it requires a “Xilinx Linux git
clone” in the “Dependencies required..” column in the Table of Supported Platforms,
then the following download procedure should be performed. We will use the
xilinx19_2_aarch32 platform as an example.
The “Dependencies required...” column for the xilinx19_2_aarch32 platform
mentions that it requires “Xilinx Linux git clone” and that the “Xilinx Linux Tag” is
xilinx_v2019.2. This tag is not used in the download procedure, but documents the
version of the Xilinx Linux kernel that will be used when the OpenCPI kernel module is
built. Here are the steps to make these repositories available to OpenCPI:
1. If there is not already one existing, create a directory under the top-level
Xilinx to ols installation directory that you created before you started the Xilinx
tools installation process (usually /tools/Xilinx or /opt/Xilinx),
called git. E.g. in this example:
mkdir -p /tools/Xilinx/git
2. Change into that directory and then download (clone) the two Xilinx source
code repositories there using these commands:
cd /tools/Xilinx/git
git clone https://github.com/Xilinx/linux-xlnx.git
git clone https://github.com/Xilinx/u-boot-xlnx.git
Once these steps are taken, the Xilinx Linux git clone is available to OpenCPI tools; in
particular, it will be used when the ocpiadmin install platform <platform>
command is run for the software platform after the Xilinx tools installation procedure is
complete. Note that the git/ directory must have write permission (recursively) for the
account that will run this ocpiadmin command.
OpenCPI Installation Guide Page 60 of 107

6.1.6 Older Xilinx SDK Tools for Cross-compilation for Older Xilinx-based Software
Platforms
These instructions require a Xilinx web site account, and the login sequence is the
same as for the Vivado WebPACK installation sequence described in the section:
Download the Xilinx Unified Installer Binary. The login dialogs are displayed when you
click the download as shown below.
These installation instructions assume you have already established the top-level
directory for Xilinx tools and have installed the Xilinx Vivado WebPACK.
The OpenCPI platforms that need these tool sets specify their versions explicitly, so
installing one of these older versions of the Vivado SDK does not force using the old
SDK when no specific version is specified.
6.1.6.1 Xilinx SDK 2013.4 Installation
In a browser on your development host, go to
https://www.xilinx.com/support/download/index.html/content/xilinx/en/
downloadNav/vivado-design-tools/archive.html. Select the 2013.4 choice, and choose
the Vivado 2013.4: Standalone SDK Single File Download Image.
After the download completes successfully, there should be a file in your ~/Downloads
directory named:
Xilinx_SDK_2013.4_1210_1.tar
Unpack the file, enter the directory you created by unpacking it, and run the installer by
entering these commands:
cd ~/Downloads
tar -xf Xilinx_SDK_2013.4_1210_1.tar
cd Xilinx_SDK_2013.4_1210_1
./xsetup
This runs the SDK installer. Select Next> on the welcome window, check the Agree
box and Next> on the license windows, Next> on the Select Products to Install
window since there is only one choice and it is enabled. Select Next> on the Select
Installation Options window, leaving Install Cable Drivers unchecked. In the Select
Destination Directory window, specify the top-level Xilinx tools installation directory
that you created before starting the Xilinx tools installation process. Select Next> and
then Next> again in the Installation window to complete the installation.
OpenCPI Installation Guide Page 61 of 107

6.1.6.2 Xilinx SDK 2018.3 Installation
In a browser on your development host, go to:
https://www.xilinx.com/support/download/index.html/content/xilinx/en/downloadNav/vitis/
archive-sdk.html
Click the 2018.3 choice, and then choose SDK 2018.3 Web Install for Linux 64:
After the download completes successfully, there should be a file in your ~/Downloads
directory named:
Xilinx_SDK_2018.3_1207_2324_Lin64.bin
This is the SDK downloader binary that will download the installer for the SDK.
Navigate to your ~/Downloads directory and run the command:
bash Xilinx_SDK_2018.3_1207_2324_Lin64.bin
The SDK downloader binary starts. A pop-up dialog alerts you that there is a newer
version of the SDK available. To download the 2018.3 version, click Continue and then
click Next. In the Select Install Type dialog, enter your Xilinx user name and password,
Select Download Full Image (install separately), replace the default directory
provided in the dialog with a temporary directory of your choice that has sufficient disk
space to accommodate the installation files and sufficient permissions to permit the
binary installer to write to this location, and don’t create a ZIP archive. Click Download.
When the download completes, click OK in the pop-up dialog to exit.
In a terminal/shell window, navigate to the directory where you downloaded the SDK
installer and then run it with the following command:
./xsetup
The installer starts. Step through the installer dialogs: accept the license agreement,
select the SDK as the installation target (it should already be selected in the dialog), and
specify the top-level Xilinx tools installation directory that you created before starting the
Xilinx tools installation process as the destination directory.
6.1.7 Xilinx Vivado Licensed Tools for Larger Recent FPGA Parts
The Vivado WebPACK installation described in the Xilinx Vivado Web PACK section is
insufficient for some OpenCPI FPGA platforms due to lack of support for the Xilinx parts
on those platforms. Consult this link for vendor information on supported parts for
WebPACK Edition.
When installing Vivado licensed tools, some different installation steps are required,
which are described in the next sections.
OpenCPI Installation Guide Page 62 of 107
6.1.7.1 Choose Vivado HL Design Edition During Installation
When running the Xilinx unified installer, in the dialog Select Edition to Install, choose
the Vivado HL Design Edition rather than the Vivado HL WebPACK. Note that these
two editions cannot coexist in the same directory tree, so if you have installed the
WebPACK Edition, and then discover you need the Design Edition, it is best to uninstall
the WebPack Edition before installing the Design Edition.
6.1.7.2 Obtain a License for the Tools and Specify its Location to OpenCPI
Licensing of these tools needs to be established per Xilinx instructions and the license
file must be made known to OpenCPI. By default, OpenCPI looks for the file named:
Xilinx-License.lic
in the top-level Xilinx tools installation directory /tools/Xilinx or /opt/Xilinx. If
you need a different location, and you don't want to use a symbolic link in the default
location, you must set the variable OCPI_XILINX_LICENSE_FILE in the user-
env.sh file to that different location.
6.1.8 Xilinx ISE 14.7 Tools for Older FPGA Parts and the isim Simulator
These instructions require a Xilinx web site account, and the login sequence is the
same as for the Vivado WebPACK installation sequence in Download Xilinx Installer.
The login screens come up when you click the download as shown below.
This installation assumes you have already created the top-level directory for Xilinx
tools.
6.1.8.1 Download the ISE Full Installer for Linux
In a browser on your development host, go to
https://www.xilinx.com/support/download/index.html/content/xilinx/en/downloadNav/viva
do-design-tools/archive-ise.html. Then select the 14.7 choice (not 14.7 Windows 10),
and choose the ISE Design Suite: Full Installer for Linux.
6.1.8.2 Run the ISE Full Installer for Linux
After the download completes successfully, there should be a file in your ~/Downloads
directory named:
Xilinx_ISE_DS_Lin_14.7_1015_1.tar
Unpack the file, enter the directory created by unpacking it, and run the installer, by
entering these commands:
OpenCPI Installation Guide Page 63 of 107

cd ~/Downloads
tar -xf Xilinx_ISE_DS_Lin_14.7_1015_1.tar
cd Xilinx_ISE_DS_Lin_14.7_1015_1
./xsetup
This runs the ISE 14.7 Installer. Select Next> on the Welcome window, check the
Agree boxes and Next> on the license windows.
The Select Products to Install window allows the selection of one product to install.
For OpenCPI, the relevant choices are:
ISE WebPACK which supports small and old devices, specified at
https://www.xilinx.com/publications/matrix/Software_matrix.pdf. It is useful with
OpenCPI for smaller devices that are not supported by the Vivado WebPACK.
Licenses are free, but required.
ISE Design Suite Logic Edition is usable with OpenCPI for any older device not
supported by Vivado. It is licensed.
ISE Design Suite Embedded/DSP/System Editions have extra features not used
by OpenCPI.
OpenCPI Installation Guide Page 64 of 107
6.2 Installing Modelsim
Modelsim is a third-party simulator offered by Mentor, a Siemens business. Although
Intel/Altera has previously provided a stripped down version of Modelsim, that version
was not usable with OpenCPI since it did not support mixing VHDL and Verilog
languages, which OpenCPI requires. Newer versions of Intel/Altera version of
Modelsim may have lifted this restriction, but there is no support yet in OpenCPI for it in
any case. The normal, purchased version of Modelsim is fully supported by OpenCPI.
To use Modelsim with OpenCPI, you need the version that runs on the Linux OS
running on your development host, and also that supports both VHDL and Verilog mixed
in the same design. CentOS7 is a supported development host for Modelsim.
6.2.1.1 Setting OpenCPI Environment Variables for Modelsim
To use Modelsim, you must set the following environment variables in the
user-env.sh file.
Set OCPI_MODELSIM_DIR to the Modelsim installation directory. This directory is
expected to contain the linuxpe subdirectory and the modelsim.ini file.
Set OCPI_MODELSIM_LICENSE_FILE to the pathname of the license file or the
network address of the license server in the form: <port>@<server.ip.addr>
6.2.1.2 Compiling Xilinx Vivado Simulation Libraries for Modelsim
To compile Xilinx Vivado simulation libraries for Modelsim, execute the following
commands:
vivado -mode tcl <<EOF
compile_simlib -simulator modelsim -32bit -directory XX\
-simulator_exec_path $OCPI_MODELSIM_DIR/linuxpe
EOF
OpenCPI Installation Guide Page 65 of 107
7 Setting up PCI Express-based HDL Platforms
Any host system that has PCI Express (PCIe) slots (most, but not all of these are x86
PCs) can host FPGA cards where the FPGA is attached directly to the PCI Express
fabric. When supported by OpenCPI, these FPGA cards can be installed and used as
OpenCPI HDL platforms that can host OpenCPI components built for these FPGAs.
Most PCIe-based HDL platform installations are similar:
Install OpenCPI on the PCIe host appropriately depending on whether it will be
used as a development host or a runtime only host.
Enable the OpenCPI development environment for the FPGA card.
Enable the OpenCPI execution environment for the FPGA card.
Some FPGA cards have their own installation steps in addition to these generic ones or
they have card-specific requirements that pertain to their installation. This information is
contained in the OpenCPI getting started guide for the card/platform. The next
sections describe PCIe-based HDL platform installation and setup for OpenCPI as they
apply to all PCI Express-based FPGA cards. When following this generic procedure, be
sure to refer to the platform/card's OpenCPI getting started guide, if one exists, for
platform/card-specific installation details to be applied to the steps described here.
OpenCPI Installation Guide Page 66 of 107

7.1 Installing OpenCPI on the PCIe Host
OpenCPI can be installed on a PCIe host such that it functions as an OpenCPI
development host or as an OpenCPI runtime host. All OpenCPI-supported PCI
Express-based FPGA cards require that the OpenCPI installation on the PCIe host,
whether development or runtime, is complete and functional.
A PCIe host established as an OpenCPI development host has the full complement of
OpenCPI tools and runtime software ready to support development and native
execution (on the development system) of OpenCPI components and applications. To
establish an OpenCPI development host installation, follow the instructions in the
section “Installing OpenCPI on Development Hosts” in this guide. Note that since
OpenCPI development-mode software is a superset of OpenCPI runtime-mode
software, all development hosts are implicitly also runtime hosts.
A PCIe host established as an OpenCPI runtime host has the OpenCPI runtime
software, which has been built on another development host and loaded onto the target
PCIe host. After installation, the runtime PCIe host supports native execution of
OpenCPI components and applications but has no OpenCPI development support:
there is no ocpidev tool and there is no support for OpenCPI projects. To establish a
PCIe host as an OpenCPI runtime host, follow the instructions in “Enabling OpenCPI
Development for Embedded Systems ” on a separate OpenCPI development host
system to create, load, and start the bootable image for the OpenCPI runtime software
on the target PCIe host. Network mode is most often deployed on PCIe runtime-only
systems, but using the other OpenCPI modes of operation is also possible. After
installation is complete, the PCIe host functions much like any other OpenCPI
embedded system.
The PCIe system to which the FPGA card is to be connected is usually set up as both
development host and runtime host. However, in some cases it may make sense to
establish a different PCIe host as a runtime host and connect the FPGA card to this
system instead of the development host system.
OpenCPI Installation Guide Page 67 of 107

7.2 Enabling the OpenCPI Development Environment for the PCIe FPGA Card
To enable the OpenCPI development environment for the PCI Express-based FPGA
card, follow the steps described in the section “Installation Steps for Platforms” in this
guide on the development host:
Install any dependencies required by the OpenCPI HDL platform for the FPGA
card that have not already been installed for another platform, as defined in the
“Table of Supported Platforms” in this guide.
Some FPGA cards have their own installation steps in addition to these generic ones or
they have card-specific requirements that pertain to their installation. This information is
contained in the OpenCPI getting started guide for the card/platform. The next
sections describe PCIe card installation and setup for OpenCPI as they apply to all PCI
Express-based FPGA cards. When following this generic procedure, be sure to refer to
the card's OpenCPI getting started guide, if one exists, for card-specific installation
details to be applied to the steps described here.
7.2.1 Installing OpenCPI on the PCIe Host
OpenCPI can be installed on a PCIe host such that it functions as an OpenCPI
development host or as an OpenCPI runtime host. All OpenCPI-supported PCI
Express-based FPGA cards require that the OpenCPI installation on the PCIe host,
whether development or runtime, is complete and functional.
A PCIe host established as an OpenCPI development host has the full complement of
OpenCPI tools and runtime software ready to support development and native
execution (on the development system) of OpenCPI components and applications. To
establish an OpenCPI development host installation, follow the instructions in the
section “Installing OpenCPI on Development Hosts” in this guide. Note that since
OpenCPI development-mode software is a superset of OpenCPI runtime-mode
software, all development hosts are implicitly also runtime hosts.
A PCIe host established as an OpenCPI runtime host has the OpenCPI runtime
software, which has been built on another development host and loaded onto the target
PCIe host. After installation, the runtime PCIe host supports native execution of
OpenCPI components and applications but has no OpenCPI development support:
there is no ocpidev tool and there is no support for OpenCPI projects. To establish a
PCIe host as an OpenCPI runtime host, follow the instructions in “Enabling OpenCPI
Development for Embedded Systems ” on a separate OpenCPI development host
system to create, load, and start the bootable image for the OpenCPI runtime software
on the target PCIe host. Network mode is most often deployed on PCIe runtime-only
systems, but using the other OpenCPI modes of operation is also possible. After
installation is complete, the PCIe host functions much like any other OpenCPI
embedded system.
The PCIe system to which the FPGA card is to be connected is usually set up as both
development host and runtime host. However, in some cases it may make sense to
OpenCPI Installation Guide Page 68 of 107

establish a different PCIe host as a runtime host and connect the FPGA card to this
system instead of the development host system.
7.2.2 Enabling the OpenCPI Development Environment for the PCIe FPGA Card
To enable the OpenCPI development environment for the PCI Express-based FPGA
card, follow the steps described in the section “Installation Steps for Platforms” in this
guide on the development host:
Install and build the OpenCPI HDL platform for the FPGA card with the
ocpiadmin utility.
When following this procedure, be sure to consult the OpenCPI getting started guide for
the specific card/platform (if one exists) for any details pertaining to these steps and/or
any additional steps that need to be performed on the development host.
OpenCPI Installation Guide Page 69 of 107
7.3 Enabling the OpenCPI Execution Environment for the PCIe FPGA Card
To enable the OpenCPI execution environment for the PCI Express-based FPGA card,
follow the steps described in this section on the runtime host:
Ensure there is sufficient power and cooling for the slots that will be used by the
card.
When following this procedure, be sure to consult the OpenCPI getting started guide for
the specific card/platform (if one exists) for any details pertaining to these steps and/or
any additional steps that need to be performed on the development host.
7.3.1 Enabling the OpenCPI Execution Environment for the PCIe FPGA Card
To enable the OpenCPI execution environment for the PCI Express-based FPGA card,
follow the steps described in this section on the runtime host:
Configure any required jumpers and/or switches on the card.
Plug in the FPGA card and power up the system.
Enable bitstream loading and (usually) JTAG access.
Load an OpenCPI bitstream into the power-up flash memory on the card.
Reboot the system.
Check and load the OpenCPI Linux kernel device driver.
Test OpenCPI's ability to see the card.
Verify the installation.
When following this procedure, be sure to consult the OpenCPI getting started guide for
the specific card/platform (if one exists) for any details pertaining to these steps and/or
any additional steps that need to be performed on the runtime host.
We use the term bitstream in this section for the file containing an FPGA configuration
to be loaded into the FPGA. Bitstream files are created by the OpenCPI development
process when the target platform is an “HDL” platform, which usually means an FPGA.
7.3.2 Ensure Sufficient Power and Cooling for the Card
PCI Express-based FPGA cards have a range of cooling and power requirements, and
some even require that the chassis and box they are plugged into be left open for
access to connectors etc.: they are “lab cards” that remain fully exposed. Others are
typical PCI Express cards that simply plug into a slot, and the box can be closed.
Frequently there are LEDs and other indicators, switches or displays that are useful to
see when the card is fully exposed.
Some cards require extra power supply cables to supply more power than is available
through the backplane connector (i.e. the PCIe slot). Some of these have their own
“power blobs” that connect directly to AC outlets, while others have power cables that
attach to the power harness in the box that usually supplies power to hard drives. For
OpenCPI Installation Guide Page 70 of 107
the latter case, you may need an adapter cable for the power harness in the system
box.
It is out of scope here to provide guidance on power and cooling issues, but ignoring the
issues can frequently result in unreliable or broken hardware. Usually the hardware
manuals of these cards provide sufficient guidance.
This step is complete when you have decided on how and where (which slot) the board
should be plugged in, how it will receive sufficient cooling, and how its power supply
requirements (and cables) will be satisfied.
7.3.3 Configure any Required Jumpers and/or Switches on the Card
Nearly all cards have hard-wired jumpers and switches that configure how the board
should operate. For the purpose of OpenCPI, the most common options relate to how
the board powers up and how the PCI Express interface behaves. For most cases, you
should configure the board so that it boots a bitstream from a part of flash memory that
can be written with a new bitstream, usually via JTAG. Even during active bitstream
development and loading via JTAG, it is required to have a baseline OpenCPI bitstream
loaded in flash memory that is automatically loaded on power up and reset.
Some PCI Express-based FPGA cards have an option to disconnect the PCI Express
interface or to become the “root” of the PCI Express fabric. Neither of these options
should be selected. The PCI Express interface should be a normal peripheral endpoint
(both master and slave) on the fabric.
Some boards only re-load the bitstream from flash memory on power cycling, while
others can/will also do it on system (PCIe fabric) reset. OpenCPI supports both
configurations.
7.3.4 Plug in the Card and Power up the System
After the cards are plugged in and the system is powered up, there is usually some
board-specific LEDs that show that the power is good, the PCI Express bus is alive, and
perhaps a factory-default bitstream has been successfully loaded from flash. See the
getting started guides for individual cards/platforms for details.
7.3.5 Enable Bitstream Loading and JTAG Access
As supported by OpenCPI, bitstreams can be loaded in one of 4 ways:
On power-up and/or PCI Express fabric reset, from on-board flash memory.
On command, from on-board flash memory.
On command, from JTAG.
On command from some other processor-accessible interface.
It is a roadmap item to support reloading a (part of) a bitstream via the PCI-Express
interface itself.
If JTAG is required (which it normally is), a cable (and possibly a “JTAG pod”) must be
connected to the board, and to a (usually) USB port on the PCIe host.
OpenCPI Installation Guide Page 71 of 107

When more than one card is in a system, and thus multiple JTAG cables are attached to
multiple USB ports, the OpenCPI system must know which JTAG cable is connected to
which card. This is done by making this association in the OpenCPI system
configuration file in $OCPI_ROOT_DIR/system.xml. An example is:
<opencpi>
<container>
<hdl>
<device name="0000:05:00.0" esn="000013C1E1F401"/>
</hdl>
</container>
...(other xml)
</opencpi>
This example says: the OpenCPI HDL (FPGA) device found at PCIe slot named
“0000:05:00.0” should be associated with the USB-based JTAG pod with the electronic
serial number (ESN) of 000013C1E1F401. The way to find the serial number is
vendor-specific, but the OpenCPI script probeJtag will scan for JTAG cables for both
Xilinx and Intel/Altera. Unfortunately, not every JTAG pod has such a serial number,
and thus more than one of them cannot be used in a system. The lspci Linux utility
can be used to list PCI Express slots and information about the cards that are plugged
into them.
This editing of the system.xml file is only necessary when there is more than one
such JTAG cable in a system.
7.3.6 Load an OpenCPI Bitstream into the Power-up Flash Memory on the Card
OpenCPI FPGA PCI-Express cards will not be discovered by OpenCPI unless they are
currently running a bitstream that was created by OpenCPI. Thus part of installation is
to write a bitstream to the card's flash memory. As mentioned in the configuration step
above, the board should be configured to boot from this flash on power up or PCI
Express reset. A good candidate for loading is the “testbias” bitstream that is built for all
supported platforms. An example of loading this default bitstream on a runtime host is:
loadFlash alst4 \
$OCPI_CDK_DIR/alst4/ocpi.assets.testbias_alst4_base.hdl.0.alst4.bitz \
01c4b5f5
This command loads the flash memory of an alst4 PCI Express card (the Altera
Stratix4 development board, OpenCPI platform name alst4) from the OpenCPI default
bitstream for the alst4, using the JTAG pod whose serial number is 01c4b5f5.
There is always also a vendor-specific method for those that are experienced users of
that vendor's tools, but the actual file to load would then not be the .bitz file but rather
a vendor-specific file probably built as part of OpenCPI's build flow.
It is a roadmap item to specify the existence of a PCI Express card in the system
configuration file, and avoid the flash bitstream requirement. This automatic mode is
currently supported only on Xilinx Zynq-based embedded processors.
OpenCPI Installation Guide Page 72 of 107

7.3.7 Reboot the System
After the initial flash bitstream is installed on the card, power cycle the runtime host. At
this point, the FPGA card is installed but it has not yet been verified that OpenCPI can
recognize it.
7.3.8 Check and Load the OpenCPI Linux Kernel Device Driver
The OpenCPI Linux kernel device driver is used to communicate between CPUs and
FPGAs. This driver is automatically loaded during runtime PCIe host setup via server,
network, or standalone script execution. It is not automatically loaded, however, during
development host setup. When the PCIe host has been set up as both development
host and runtime host, the driver must be explicitly loaded to enable OpenCPI
communication between the host and the installed PCI Express FPGA card(s).
To load the driver, use the command:
ocpidriver load
Note that this command requires root privileges/sudo. See the ocpidriver man
page for command usage details.
You can manually load the Linux kernel device driver with ocpidriver load when
necessary, or have it loaded at system boot time by running the ocpidriver load
command in the startup script that is appropriate for the operating system in use. The
driver must be loaded before OpenCPI applications can be run on the PCI Express
FPGA card.
To check whether the Linux kernel driver is loaded, issue the command:
ocpidriver status
If the command reports that the driver is not currently loaded, issue the ocpidriver
load command as described above. You should receive a message that the driver was
successfully loaded.
7.3.9 Test OpenCPI's Ability to See the Card
After the HDL platform for the FPGA card is installed/built on the development host and
the OpenCPI Linux kernel device driver is loaded on the runtime host, you can use the
OpenCPI utility ocpihdl on the runtime host to check that OpenCPI can locate the
FPGA card. The following command will search for recognizable cards and print out
their information:
ocpihdl search
This command should print out the cards it could find, along with the PCI Express
address for each. If you have more than one of the same card, in different slots, you
will see them both, although other than the slot, there is no other identifying information.
It is a roadmap item to display the electronic serial number of the card/chip itself,
although not all boards or chips have such unique identification.
OpenCPI Installation Guide Page 73 of 107

7.3.10 Verify the Installation
To confirm a successful installation, run the test application on the runtime host as
described in “Running a Test Application” in the section “Installation Steps for Systems
After Their Platforms Are Installed”, using the --platform (-P) instance option to
ocpirun(1) to assign the test application “bias” worker to the HDL platform of the
FPGA card.
OpenCPI Installation Guide Page 74 of 107

8 Connecting HDL Platforms to an Ethernet Network
Each HDL (FPGA) platform connected to an Ethernet network must have its own unique
MAC address. However, some hardware platforms supported by OpenCPI either have
no built-in MAC address or their built-in MAC address is not unique to the board. In this
case, you must assign a unique MAC address to each platform of this type that you plan
to connect to your Ethernet network by editing the OpenCPI SD card startup script
mynetsetup.sh or mysetup.sh that you create when you prepare the SD card
contents for the embedded system. Open the appropriate SD card startup script with a
text editor, uncomment the following lines, and then change the Ethernet address to be
unique. For example:
ifconfig eth0 down
ifconfig eth0 hw ether 00:0a:35:00:01:24
ifconfig eth0 up
udhcpc
where these lines are uncommented and 00:0a:35:00:01:24 is the unique MAC
address for the board.
OpenCPI Installation Guide Page 75 of 107
9 Performing an Air-gapped Installation
These steps apply to CentOS7 systems only.
If you are starting from scratch, you may want to download the “CentOS7 everything”
iso from one of the available mirrors onto a separate bootable medium. Otherwise, you
should only need to download required files onto a disk or fat32-formatted USB.
Note: when copying/pasting text from this document, be sure to remove any line breaks
from the copied text.
OpenCPI Installation Guide Page 76 of 107

9.2 Download CentOS Repositories
On a network-accessible system, you’ll want to install createrepo and yum-utils:
sudo yum install createrepo
sudo yum install yum-utils
The yum tool createrepo is quite important as it will allow you to bundle several.rpm
files together into a repomd repository.
Now we want to create directories for a local repository. Run the following commands:
sudo mkdir –p /var/local/repos/
{base,centosplus,extras,updates,epel}
sudo reposync -g -l -d -m --repoid=base --newest-only
--download-metadata --download_path=/var/local/repos/
sudo reposync -g -l -d -m --repoid=centosplus --newest-only
--download-metadata --download_path=/var/local/repos/
sudo reposync -g -l -d -m --repoid=extras --newest-only
--download-metadata --download_path=/var/local/repos/
sudo reposync -g -l -d -m --repoid=updates --newest-only
--download-metadata –-download_path=/var/local/repos/
sudo reposync -g -l -d -m --repoid=epel --newest-only
--download-metadata –-download_path=/var/local/repos/
If you look inside these directories, you’ll see a Packages/ directory full of .rpm files.
Next, we need to turn each directory into a repository with the commands:
sudo createrepo /var/local/base
sudo createrepo /var/local/centosplus
sudo createrepo /var/local/extras
sudo createrepo /var/local/updates
sudo createrepo /var/local/epel
Looking into your local repositories, you’ll see a repodata/ directory in each one with
a repomd.xml file as well as some compressed files.
9.2.1 Copy Repository Files
Since you’re on a CentOS7 system, you can copy over the
/etc/yum.repos.d/.repo files needed. You will need to modify them, as they are
likely set to use online mirrors.
You’ll need to copy over the CentOS-Base.repo and epel.repo files.
OpenCPI Installation Guide Page 78 of 107
9.3 Edit Repository Files
Edit your .repo files as shown below to use local files rather than trying to look for
mirrors online. You can use a placeholder path for your repository location for now.
For CentOS-Base.repo:
[base]
name=CentOS-$releasever - Base
#mirrorlist=http://mirrorlist.centos.org/?release=$releasever&arch=
$basearch&repo=os
baseurl=file:///<your_repo_location>
enabled=1
gpgcheck=0
#gpgkey=file:///etc/pki/rpm-gpg/RPM-GPG-KEY-CentOS-5
#released updates
[updates]
name=CentOS-$releasever - Updates
#mirrorlist=http://mirrorlist.centos.org/?release=$releasever&arch=
$basearch&repo=updates
baseurl=file:///<placeholder_path>/updates
enabled=1
gpgcheck=0
#gpgkey=file:///etc/pki/rpm-gpg/RPM-GPG-KEY-CentOS-5
#additional packages that may be useful
[extras]
name=CentOS-$releasever - Extras
#mirrorlist=http://mirrorlist.centos.org/?release=$releasever&arch=
$basearch&repo=extras
baseurl=file:///<placeholder_path>/extras
enabled=1
gpgcheck=0
#gpgkey=file:///etc/pki/rpm-gpg/RPM-GPG-KEY-CentOS-5
OpenCPI Installation Guide Page 79 of 107
#additional packages that extend functionality of existing packages
[centosplus]
name=CentOS-$releasever - Plus
#mirrorlist=http://mirrorlist.centos.org/?release=$releasever&arch=
$basearch&repo=centosplus
baseurl=file://<your_repo_location>/centosplus
enabled=1
gpgcheck=0
#gpgkey=file:///etc/pki/rpm-gpg/RPM-GPG-KEY-CentOS-5
For epel.repo:
[epel]
name=Extra Packages for Enterprise Linux 7 - $basearch
# It is much more secure to use the metalink, but if you wish to use
a local mirror
# place its address here.
baseurl=file:///<your_repo_location>/epel
#metalink=https://mirrors.fedoraproject.org/metalink?repo=epel-
7&arch=$basearch&infra=$infra&content=$contentdir
enabled=1
gpgcheck=0
#gpgkey=file:///etc/pki/rpm-gpg/RPM-GPG-KEY-EPEL-7
[epel-debuginfo]
name=Extra Packages for Enterprise Linux 7 - $basearch - Debug
# It is much more secure to use the metalink, but if you wish to use
a local mirror
# place its address here.
#baseurl=http://download.example/pub/epel/7/$basearch/debug
metalink=https://mirrors.fedoraproject.org/metalink?repo=epel-debug-
7&arch=$basearch&infra=$infra&content=$contentdir
failovermethod=priority
enabled=0
gpgkey=file:///etc/pki/rpm-gpg/RPM-GPG-KEY-EPEL-7
gpgcheck=1
[epel-source]
name=Extra Packages for Enterprise Linux 7 - $basearch - Source
# It is much more secure to use the metalink, but if you wish to use
a local mirror
# place it's address here.
#baseurl=http://download.example/pub/epel/7/source/tree/
OpenCPI Installation Guide Page 80 of 107
metalink=https://mirrors.fedoraproject.org/metalink?repo=epel-
source-7&arch=$basearch&infra=$infra&content=$contentdir
failovermethod=priority
enabled=0
gpgkey=file:///etc/pki/rpm-gpg/RPM-GPG-KEY-EPEL-7
gpgcheck=1
After you've edited these files, copy over the entire /var/local/ directory and the
repo files into your storage device. It is the first of things you’ll want to copy.
OpenCPI Installation Guide Page 81 of 107
9.4 Download Python Packages
Here is the list of required Python packages:
python3-3.6.8-18.el7.x86_64
python3-devel-3.6.8-18.el7.x86_64
python36-jinja2-2.11.1-1.el7.noarch
python36-numpy-1.12.1-3.el7.x86_64
python36-scipy-0.18.1-2.el7.x86_64
python3-tkinter-3.6.8-18.el7.x86_64
python3-pip-9.0.3-8.el7.noarch
cmake3-3.17.5-1.el7.x86_64
fakeroot-1.26-4.el7.x86_64
ocl-icd-2.2.12-1.el7.x86_64
python36-scons-3.1.2-1.el7.noarch
dtc-1.4.6-1.el7.x86_64
1:openssl-devel-1.0.2k-24.el7_9.x86_64
perl-ExtUtils-MakeMaker-6.68-3.el7.noarch
chrpath-0.16-0.el7.x86_64
diffstat-1.57-4.el7.x86_64
texinfo-5.1-5.el7.x86_64
python36-PyYAML-3.13-1.el7.x86_64
libjpeg-turbo-devel-1.2.90-8.el7.x86_64
matplotlib-3.3.2
However, it is simpler to download just numpy and matplotlib, as the rest of the
packages are likely already in other repositories. Gather them into a file called
requirements.txt in this format:
Flask==0.12
requests>=2.7.0
scikit-learn==0.19.1
numpy==1.14.3
pandas==0.22.0
matplotlib==3.3.2
Then download them with the command:
pip3 download -r requirements.txt
Copy these contents into your storage device.
OpenCPI Installation Guide Page 82 of 107

9.5 Download Prerequisites
The following table lists the needed prerequisites along with where to get them.
OpenCPI Prerequisites
Prerequisite Location
ad9361 https://codeload.github.com/analogdevicesinc/no-
OS/zip/8c52aa42e74841e3975a6f33cc5303ed2a670124
asciidoc3 https://asciidoc3.org/asciidoc3-3.2.3.tar.gz
gmp https://ftp.gnu.org/gnu/gmp/gmp-6.2.0.tar.xz
gpsd https://download-
mirror.savannah.gnu.org/releases/gpsd/gpsd-3.18.1.tar.gz
gtest wget
https://github.com/google/googletest/archive/release-
1.8.1.tar.gz
inode64 http://www.mjr19.org.uk/sw/inode64.c
iperf https://downloads.es.net/pub/iperf/iperf-3.9.tar.gz
liquid wget http://liquidsdr.org/downloads/liquid-dsp-
1.3.1.tar.gz
lzma https://cfhcable.dl.sourceforge.net/project/lzmautils/xz-
5.2.5.tar.gz
myhostname https://gitlab.com/opencpi/opencpi/-/blob/develop/build/p
rerequisites/myhostname/myhostname.c
mykonos https://github.com/analogdevicesinc/no-OS/tarball/master
patchelf http://nixos.org/releases/patchelf/patchelf-0.9/patchelf-
0.9.tar.gz
tar https://ftp.gnu.org/gnu/tar/tar-1.32.tar.gz
xvcd https://codeload.github.com/RHSResearchLLC/xvcd/legacy.ta
r.gz/d42b07f70cffd9e53f41c33b3960e1474cfbfc04
yaml_cpp http://sources.buildroot.net/yaml-cpp/yaml-cpp-
0.6.3.tar.gz
9.5.1 Using the Cache Method
There is another “cheat” method for prerequisites where you direct the OpenCPI
installation to use the cache rather than point it to a local directory. You can also use a
combination of both methods. This method is also the more reliable one at the moment
as some of the git files required may be difficult to configure.
On a network-connected system, clone the OpenCPI code base (see the instructions in
this guide) and then run the following commands in your opencpi directory:
./scripts/install-packages.sh
./scripts/install-prerequisites
Copy the contents of opencpi/prerequisites and opencpi/prerequisites-
build to where you have the other packages.
OpenCPI Installation Guide Page 83 of 107

Caution: For any of the packages, in particular ad9361, be careful that when copying
contents and using the cache method that the files match the chmod rwx permissions
in the network connected system.
Now you have all the external items needed to install with opencpi-setup.sh.
OpenCPI Installation Guide Page 84 of 107
9.6 Set up the Air-gapped System
On your air-gapped system, ensure that you have disabled secure boot in the BIOS.
This affects ocpidriver, which is tested at installation.
You can now move the packages into your air-gapped system:
Move your local repository into /var/local/
Move your Python files into /var/python3.6/
Move your prerequisites into ~/prerequisites/
If there are existing repo files in /etc/yum.repos.d/, you can move them into a
temporary directory (/etc/yum.repos.d/tmp/) and then move the two repo files into
/etc/yum.repos.d/. Don’t forget to modify the paths in your repo files to reflect
where you placed the repositories on your system.
Finally, move your OpenCPI clone somewhere into your system and unpack it if
necessary.
OpenCPI Installation Guide Page 85 of 107
9.7 Set up and Install python3.6 Packages
Make sure you have pip3 installed. We recommend installing your packages before
running the OpenCPI installation scripts.
From a shell/terminal window, run the following command.
pip3 install --no-index --find-links /path/to/download/dir/ -r
requirements.txt
OpenCPI Installation Guide Page 86 of 107
9.8 Set Environment Variables
As explained in opencpi/tools/scripts/setup-prerequisite.sh, there are
environment variables to set to where the script should look for the prerequisites and
whether to use local, cache, or internet.
In a shell/terminal window, navigate to your opencpi directory and run the following
commands:
export OCPI_PREREQUISITES_LOCAL_PATHNAME=<path-to-prerequisites>
export OCPI_PREREQUISITES_DOWNLOAD_PATH=local:cache
OpenCPI Installation Guide Page 87 of 107
9.9 Run OpenCPI Installation Script
If you haven't had any problems up to this point, in the shell/terminal window, navigate
to your opencpi directory and run the following command:
./scripts/install-opencpi.sh
OpenCPI Installation Guide Page 88 of 107
10 Glossary of Terms
This glossary provides definitions for OpenCPI-specific and industry-wide terms and
acronyms used in OpenCPI documentation.
OpenCPI Installation Guide Page 89 of 107

10.1 OpenCPI Terminology
This section provides definitions for terms that are specific to OpenCPI.
ACI
See Application Control Interface.
adapter worker
An adapter worker is the w orker used when two connected HDL workers are not
connectable in some way due to different interface choices in the OWD. Adapter
workers are normally inserted automatically as needed, e.g. between a worker
that has a 16-bit bus and one with a 32-bit bus, or HDL workers in different clock
domains. These workers are considered part of the OpenCPI framework and not
created by users. See also worker .
application
[noun] In the context of component-based development, an application is a
composition or assembly of connected components that, as a whole, perform
some useful function. See also component.
[adjective] The term application can also be used to distinguish functions or
code from infrastructure to support the execution of a component-based
application; e.g., an HDL d evice worker vs. an application worker.
Application Control Interface (ACI)
The Application Control Interface (ACI) is an application launch and control
API for executing XML-based OpenCPI applications within a C++ or Python
program. See the chapter on the ACI in the OpenCPI Application
Development Guide for more information.
application worker
An application worker is the implementation of a component used in an
application, generally portable and hardware independent.
argument
See operation argument.
artifact
An artifact is a file that contains executable code for one or more workers, built
for a specific platform. An artifact is a binary file that results from building some
assets. See the overview in the OpenCPI Application Development Guide for
more information.
asset
An asset is an object that is developed for OpenCPI, including applications,
components, workers, protocols, platforms, primitives and other asset types. An
asset is developed in a project and is defined by an XML file.
OpenCPI Installation Guide Page 90 of 107

authoring model
An authoring model is a method for creating component implementations in a
specific language using a specific API between the worker and its execution
environment. An authoring model represents a particular way to write the source
code and XML for a worker and is usually associated with a class of processors
and a set of related languages. Existing models include RCC, HDL and OCL.
See the chapter on authoring models in the OpenCPI Component
Development Guide for more information.
back pressure
Back pressure is the resistance or force opposing the desired flow of data
through an application. Back pressure within an OpenCPI system is a common
occurrence that happens when worker output is temporarily not possible due to
processing or communication congestion from whatever the output is connected
to. Back pressure can be the result of resource-loading issues or passing data
between co ntainers .
build configuration
A build configuration is a set of parameter property (compile-time) values to
use when building a worker. See the chapter on worker build configuration XML
files in the OpenCPI Component Development Guide for more information.
CDK
See Component Development Kit
component
A component is the interface “contract” specified by an OpenCPI C omponent
S pecificatio n (OCS) and implemented by a worker. A component performs a
well-defined function regardless of implementation. A component has ports and
properties. See the chapter on component specifications in the OpenCPI
Component Development Guide for more information.
Component Development Kit (CDK)
The OpenCPI Component Development Kit (CDK) is the set of OpenCPI tools,
scripts, documents, and libraries used for developing components, workers and
other assets in projects.
component library
A component library is a collection of component specifications, workers and
test suites that can be built, exported, and installed to support applications. See
the chapter on component libraries in the OpenCPI Component Development
Guide for more information.
component specification
See OpenCPI Component Specification (OCS).
OpenCPI Installation Guide Page 91 of 107

component unit test suite
A component unit test suite is a collection of test cases in a component library
for testing all the workers in the library that implement the same spec (OCS)
across all available platforms. The workers that are tested can be written to
different authoring models or languages or simply be alternative source code
implementations of the same spec. The OpenCPI unit test framework manages
multiple dimensions of worker testing, with automation to minimize test design
and preparation efforts. See the chapter on worker unit testing in the OpenCPI
Component Development Guide for more information.
configuration property
A configuration property is a writeable and/or readable value specified in the
OCS or OWD that enables control software to control and monitor a worker.
Configuration properties (usually abbreviated to properties) are logically the
knobs and meters of the worker's “control panel”. Each worker may have its
own, possibly unique, set of configuration properties which can include hardware
resources such registers, memory, and state. Properties can be specified as
compile time or runtime. See the chapter on property syntax and ranges in the
OpenCPI Component Development Guide for more information. See also
configuration property accessibility.
configuration property accessibility
Configuration property accessibility is the set of declarations within an OCS
or OWD that indicate when it is valid to read from or write to a configuration
property. The various accessibility attributes (defined in the OpenCPI
Component Development Guide) establish the rules in relation to the worker’s
lifecycle and may declare the property as fixed at build time (see parameter).
container
A container is the OpenCPI infrastructure element that “contains,” manages, and
executes a set of workers. Logically, the container “surrounds” the workers,
mediating all interactions between the workers and the rest of the system. A
container typically provides the OpenCPI runtime environment for a particular
processor in the system. See the section on the RCC worker interface in the
OpenCPI RCC Development Guide for more information on RCC containers.
See the section on HDL container XML files in the OpenCPI HDL Development
Guide for more information on HDL containers.
control-application
A control-application is the conventional application (e.g. “main program”) that
constructs and runs component-based applications. See the chapter on the ACI
in the OpenCPI Application Development Guide for more information.
OpenCPI Installation Guide Page 92 of 107

control interface
The control interface is the interface as seen by HDL worker code that an HDL
container uses to provide (at a minimum) a control clock and associated reset
into the worker, convey life cycle control operations like initialize, start and stop,
and access the worker’s configuration properties as specified in the OCS and
OWD. See the section on the control interface in the OpenCPI HDL
Development Guide for more information.
control operations
Control operations are a fixed set of operations that every worker may have.
These operations implement a common control model that allows all workers to
be managed without having to customize the management infrastructure
software for each worker, while configuration properties are used to specialize
components. The most commonly used control operations are “start” and “stop”.
See the section on lifecycle control operations in the OpenCPI Component
Development Guide for more information.
control plane
In OpenCPI, the control plane is the control and configuration infrastructure for
runtime lifecycle control and configuration of worker instances throughout the
system at runtime. See the control plane introduction in the OpenCPI
Component Development Guide for more information.
control software
Control software is the software that launches and controls OpenCPI
applications, either the standard OpenCPI utility ocpirun or custom C++ or
Python programs that perform the same function embedded inside them using
the Application Control Interface application launch and control API. See the
control plane introduction in the OpenCPI Component Development Guide for
more information. See also control-application.
Control software generally launches, configures and controls an application and
the runtime workers that make up the application. A proxy, meanwhile, is a
worker within an application that can control and configure other workers. See
the OpenCPI RCC Development Guide for more information. See also device
proxy worker.
core project
The OpenCPI core project is a built-in OpenCPI project (package ID
ocpi.core) that contains the minimum set of workers and infrastructure VHDL
for OpenCPI framework operation on software and FPGA simulators.
data interface
A data interface is the set of ports defined in a worker's OCS that convey data,
message boundaries, opcodes and EOF into and out of the worker and which
implement flow control.
OpenCPI Installation Guide Page 93 of 107

data plane
In OpenCPI, the data plane is a data-passing infrastructure that allow workers of
all types to consume/produce data from/to other workers in an application
regardless of the container on which the workers are executing in (or the
processor on which they are executing). See the data plane introduction in the
OpenCPI Component Development Guide for more information.
device proxy worker
A device proxy worker is a software worker (RCC/C++) that is specifically
paired with one or more HDL device worke rs in order to translate a higher-level
control interface for a class of devices into the lower-level actions required on a
specific device. See the section on controlling slave workers from proxies in the
OpenCPI RCC Development Guide and the section on device support for FPGA
platforms in the OpenCPI Platform Development Guide for more information.
device worker
See HDL device worker.
Digital Radio Controller (DRC)
The Digital Radio Controller (DRC) is a utility c omponent in the OpenCPI built-
in core project that is used when an application needs to use radio hardware in
the system to control it and to stream sample data to and from it. The “digital
radio” functionality in a system usually has antennas for transmitting and
receiving RF signals and channels which convert the RF signals to and from
baseband digital samples that are produced and consumed by the application.
See the section on utility components for applications in the OpenCPI
Application Development Guide for more information.
HDL assembly
An HDL assembly is a fixed composition of connected HDL workers that are
built into a complete FPGA bitstream that can be executed on an FPGA to
implement some or all of the components of an OpenCPI application. The HDL
code is automatically generated from the HDL assembly’s OHAD. See the
chapter on preparing HDL assemblies for use by applications in the OpenCPI
Application Development Guide and the OpenCPI HDL Development Guide
for more information.
HDL authoring model
The HDL authoring model is the authoring model used by VHDL-language and
less-supported Verilog-language workers that execute on FPGAs. See the
OpenCPI HDL Development Guide for information about using this authoring
model. See also Hardware Description Language (HDL).
HDL build hierarchy
The HDL build hierarchy is the structure in which FPGA bitstreams are created
from other assets. See the section about the HDL build hierarchy in the
OpenCPI HDL Development Guide for more information.
OpenCPI Installation Guide Page 94 of 107

HDL build process
The HDL build process is the process of building HDL assets for different target
devices and platforms. See the chapter on building HDL assets in the OpenCPI
HDL Development Guide for more information.
HDL card
An HDL card is hardware that contains devices and plugs into a slot on an HDL
platform. Devices are either directly attached to the pins on an HDL platform or
attached to cards that plug into compatible slots on the platform. Devices on a
card are considered to be part of the card, which can be plugged into a certain
type of slot on any platform, rather than part of the platform itself. See the
sections on device support for FPGA platforms and defining cards that contain
devices that plug in to platform slots in the OpenCPI Platform Development
Guide for more information.
HDL data interface
An HDL data interface is the set of ports defined in an HDL worker's OCS that
convey data, message boundaries, opcodes and EOF into and out of the HDL
worker and which implement flow control. Worker data ports can be
implemented as stream or message interfaces. Stream interfaces are FIFO-like
with extra qualifying bits along with the data indicating message boundaries, byte
enables and EOF. Message interfaces are based on addressable message
buffers. See the section on HDL worker data interfaces for OCS data ports in the
OpenCPI HDL Development Guide for more information.
HDL device emulator worker
An HDL device emulator worker is a special type of HDL device worker that
acts like a device for test purposes. A device emulator worker provides a mirror
image of an HDL device worker’s external signals so that it can can emulate the
device in simulation. See the section on testing device workers with emulators in
the OpenCPI Platform Development Guide for more information.
HDL device worker
An HDL device worker is a specific type of HDL worker designed to support a
specific external device attached to an FPGA such as an ADC, flash memory, or
I/O device. HDL device workers are typically developed as part of enabling an
HDL platform. See the chapter on device support for FPGA platforms in the
OpenCPI Platform Development Guide for more information.
HDL interface
(1) For HDL workers, an HDL interface is the set of input and output port signals
that correspond to a high-level OpenCPI port as defined in the OCS and OWD
for the HDL worker. An HDL worker has a control interface (for the implicit control
port), data interfaces (for the explicit data ports defined in the OCS), and service
interfaces (for service ports as defined in the HDL worker's OWD).
(2) For all worker types, an HDL interface is the implicit control port.
OpenCPI Installation Guide Page 95 of 107

HDL platform
An HDL platform is an OpenCPI platform based on an FPGA that is enabled to
host OpenCPI HDL workers. An HDL simulator is also considered to be an HDL
platform. See the chapter on enabling FPGA platforms in the OpenCPI Platform
Development Guide for more information.
HDL platform configuration
An HDL platform configuration is a pre-built (usually pre-synthesized)
assembly of HDL device workers that represents a particular reusable
configuration of device support modules for a given HDL platform. The HDL code
is automatically generated from a brief description in XML. See the section on
enabling execution for FPGA platforms in the OpenCPI Platform Development
Guide for more information.
HDL platform worker
An HDL platform worker is a specific type of HDL worker that enables an HDL
platform for use with OpenCPI and provides the infrastructure for implementing
control/data interfaces to devices and interconnects external to an FPGA or
simulator, such as PCI e or clocks. See the section on enabling execution for
FPGA platforms in the OpenCPI Platform Development Guide for more
information.
HDL primitive
An HDL primitive is an HDL asset that is lower level than a worker and can be
used (and reused) as a building block for HDL workers. An HDL primitive is
either a library or a core. See the chapter on HDL primitives in the OpenCPI
HDL Development Guide for more information.
HDL primitive core
An HDL primitive core is a low-level module that can be built and/or synthesized
from source code, or imported as pre-synthesized and possibly encrypted from
third parties, or generated by tools like Xilinx CoreGen or Intel/ Altera
MegaWizard. An HDL worker declares which primitive cores it requires (and
instantiates). See the chapter on HDL primitives in the OpenCPI HDL
Development Guide for more information.
HDL primitive library
An HDL primitive library is a collection of low-level modules compiled from
source code that can be referenced in HDL worker code. An HDL worker
declares the HDL primitive libraries from which it draws modules. See the
chapter on HDL primitives in the OpenCPI HDL Development Guide for more
information.
OpenCPI Installation Guide Page 96 of 107

HDL slot
An HDL slot is an integral part of an HDL platform that enables an HDL card to
be plugged in so that its attached devices are accessible to the platform. An HDL
platform has defined slot types; HDL cards that are designed for the same slot
type can be plugged in to the defined slots on the platform. See the sections on
device support for FPGA platforms and defining cards that contain devices that
plug in to platform slots in the OpenCPI Platform Development Guide for more
information.
HDL subdevice worker
An OpenCPI HDL subdevice worker is a special type of HDL application worker
that supports an HDL device worker defined in another library. See the section
on subdevice workers in the OpenCPI Platform Development Guide for more
information.
HDL worker
An HDL worker is an HDL implementation of a component specification with the
source code (for example, VHDL) written according to the HDL authoring model.
An HDL worker is usually a hardware-independent, portable application worker
but can alternatively be an HDL device worker that controls a specific piece of
hardware attached to an FPGA. See the chapter on the HDL worker in the
OpenCPI HDL Development Guide for more information.
lifecycle state model
The OpenCPI lifecycle state model specifies the control states each worker
may be in and the control operations which generally change the state a worker
is in, effecting a state transition. See the section on the lifecycle state model in
the OpenCPI Component Development Guide for more information.
OAS
See OpenCPI Application Specification.
OCS
See OpenCPI Component Specification.
OHAD
See OpenCPI HDL Assembly Description.
OHPD
See OpenCPI HDL Platform Description.
opcode
See o peration c ode .
OpenCL (OCL) authoring model
The OpenCL (OCL) authoring model is the authoring model used by Open
Computing Language (OpenCL) (C subset/superset)-language workers usually
executing on graphics processors. See the OpenCPI OCL Development Guide
for more information. This OpenCPI authoring model is currently experimental.
OpenCPI Installation Guide Page 97 of 107

OpenCPI Application Specification (OAS)
An OpenCPI Application Specification (OAS) is an XML document that
describes the collection of components along with their interconnections and
configuration properties that defines an OpenCPI application. See the chapter
on OpenCPI application specification XML documents in the OpenCPI
Application Development Guide for more information.
OpenCPI Component Specification (OCS)
An OpenCPI Component Specification (OCS) is an XML file that describes
both configuration properties and zero or more data ports (referring to protocol
specifications) of a component, establishing interface requirements for multiple
implementations (workers) in any authoring model. Also referred to as a
component spec or spec file. See the chapter on component specifications in the
OpenCPI Component Development Guide for more information.
OpenCPI HDL Assembly Description (OHAD)
An OpenCPI HDL Assembly Description (OHAD) is an XML file that describes
an HDL assembly. See the chapter on HDL assemblies for creating and
executing FPGA bitstreams in the OpenCPI HDL Development Guide for more
information.
OpenCPI HDL Platform Description (OHPD)
An OpenCPI HDL Platform Description (OHPD) is an XML file that describes
an HDL platform. An OHPD contains the same information as the OWD for the
HDL platform worker and also describes the devices (controlled by HDL device
workers) that are attached to the HDL platform and available for use. See the
section on enabling execution for FPGA platforms in the OpenCPI Platform
Development Guide for more information.
OpenCPI Protocol Specification (OPS)
An OpenCPI Protocol Specification (OPS) is an XML file that describes the
allowable data messages (operation codes) and payloads (operation arguments)
that may flow between the ports of components. See the chapter on protocol
specifications in the OpenCPI Component Development Guide for more
information.
OpenCPI System support Project (OSP)
An OpenCPI System support Project (OSP) is an OpenCPI project that
contains OpenCPI assets whose purpose is to enable and test a particular
system (of platforms) to be used by OpenCPI. OSPs fulfill what is generally
meant by the more generic industry term: Board Support Package. An OSP may
contain assets to support multiple related systems. See also Board Support
Package (BSP).
OpenCPI Installation Guide Page 98 of 107

OpenCPI Worker Description (OWD)
An OpenCPI Worker Description (OWD) is an XML file that describes the
worker and references the component specification it is implementing. See the
chapter on worker descriptions in OWD files in the OpenCPI Component
Development Guide for more information.
operation argument
An operation argument is one of the data values in the payload data defined for
a particular operation (message type) within a protocol specification whose type
information is determined by the protocol XML.
operation (within a protocol)
An operation is a message type encapsulating zero or more operation
arguments within an OpenCPI protocol specification .
operation code (opcode)
An operation code (opcode) is an ordinal that indicates which of the possible
operations in a protocol is present.
OPS
See OpenCPI Protocol Specification.
OSP
See OpenCPI System support Project .
OWD
See OpenCPI Worker Description.
package ID
A package ID is the globally-unique identifier of an OpenCPI asset. A project's
package ID is used when it is depended on by other projects. A component's
package ID is used to reference it in applications or workers. While all assets
have package IDs (either explicitly specified or inferred from the directory
structure), only certain assets are currently identified by their package IDs. See
the section on package IDs in the OpenCPI Component Development Guide
for more information.
parameter
A parameter is an immutable configuration property that is set at build time,
allowing software compilers and hardware compilers to optimize accordingly.
See the sections on properties that are build-time parameters, property
accessibility attributes, and the parameter attribute of property elements and
SpecProperty elements in the OpenCPI Component Development Guide for
more information.
OpenCPI Installation Guide Page 99 of 107

platform
An OpenCPI platform is a particular type of processing hardware and/or
software that can host a container for executing OpenCPI workers based on
artifacts. Platforms may be based on CPUs, GPUs or FPGAs. See the chapter
on OpenCPI systems and platforms in the OpenCPI Platform Development
Guide for more information.
platform worker
See HDL platform worker.
port
An OpenCPI port is an interface of a component that allows it to communicate
with other components using a protocol. Ports are unidirectional: input or output,
consumer or producer. In OpenCPI, a port is a high-level data flow interface in
and out of all types of workers. In the VHDL and Verilog languages, however, a
“port” refers to the individual signals (of any type) that are the inputs and outputs
of an entity (VHDL) or module (Verilog). See the chapter on component
specifications in the OpenCPI Component Development Guide for more
information.
port readiness
Port readiness indicates whether an input port has data to be consumed or an
output port has capacity to produce data (e.g. no back pressure). Input ports are
ready when there is message data present that has not yet been consumed by
the worker. Output ports are ready when buffers are available into which they
may place new data.
project
An OpenCPI project is a work area (and directory) in which to develop OpenCPI
components, libraries, applications, and other platform- and device-oriented
assets. See the chapter on developing OpenCPI assets in projects in the
OpenCPI Component Development Guide for more information.
project registry
An OpenCPI project registry is a directory that contains references to projects
in a development environment so they can refer to (and depend on) each other.
Development activity takes place in the context of a project registry that specifies
available projects to use. See the section on the project registry in the OpenCPI
Component Development Guide for more information.
property
See co nfiguration p ropert y .
protocol specification
See OpenCPI Protocol Specification (OPS).
OpenCPI Installation Guide Page 100 of 107

protocol summary
A protocol summary is the set of summary attributes, whether inferred from the
messages specified for the protocol, or specified directly as attributes of the
protocol, and indicates the basic behavior of a port using a protocol. A protocol
summary can also be present when messages are specified, and can override
the attributes inferred from the message specifications. See also Component
Development Kit (CDK).
RCC, RCC authoring model
See Resource-Constrained C (RCC) authoring model.
Resource-Constrained C (RCC) authoring model
The Resource-Constrained C (RCC) authoring model is the au thoring model
used by C or C++ language workers that execute on G eneral- P urpose
P rocessors (GPPs). The “Resource Constrained” prefix indicates that the
environment may be constrained to use a limited set of library calls; see the
OpenCPI RCC Development Guide for more information.
registry
See pr oject r egistry .
RCC worker
An RCC worker is an RCC implementation of an OpenCPI component
specification with the source code (for example, C++ or Python) written according
to the RCC authoring model . An RCC worker can act as a device proxy worker.
See the OpenCPI RCC Development Guide for more information.
run condition
A run condition is the specification by an RCC worker as to when it should
execute, based on a combination of port readiness and/or some amount of time
having passed. The commonly-used default run condition is when all ports are
ready, with no consideration of time passing.
run method
A run method is a non-blocking software method that is executed when a
worker’s run condition is satisfied, as determined by its container.
spec file
Spec file (and component spec) is shorthand notation for an OpenCPI
C omponent S pecification file.
SpecProperty
A SpecProperty is an XML element that adds a worker-specific attribute to a
configuration propert y already defined in the component spec. See the section
on worker descriptions in OWD XML files in the OpenCPI Component
Development Guide for more information.
OpenCPI Installation Guide Page 101 of 107

system
In OpenCPI, a system is a collection of platforms usually in a box or on a system
bus or fabric.
target
An OpenCPI target is the entity for which an asset should be built (compiled,
synthesized, place-and-routed, etc.) In OpenCPI, build targets are usually
platforms (particular products or particular operating system releases and
architectures). When a set of platforms shares a common processor architecture
family, it is sometimes possible to build for the "family" and the results of that
build can be used for all the platforms. See the section on RCC compilation and
linking options in the OpenCPI RCC Development Guide and the section on
HDL build targets in the OpenCPI HDL Development Guide for more
information.
worker
An OpenCPI worker is a specific implementation (and possibly a runtime
instance) of a component specification with the source code written according to
an authoring model. See the introductory chapter on workers in the OpenCPI
Component Development Guide for more information.
worker property
A worker property is a configuration property related to a particular
implementation (design) of a worker; that is, one that is not necessarily common
across a set of implementations of the same high-level component specification
(OCS). A worker property is additional to the properties defined by the
component specification being implemented. See the section on how a worker
access its properties in the OpenCPI RCC Development Guide and the
sections on property access and property data types in the OpenCPI HDL
Development Guide for more information.
unit test
See component unit test suite .
Zero-Length Message (ZLM)
A Zero-Length Message (ZLM) is a data payload with no operation arguments
present when a protocol specification specifies such an operation code with no
data fields.
OpenCPI Installation Guide Page 102 of 107

10.2 Industry Terminology
This section provides definitions for industry-wide terms relating to OpenCPI.
Advanced eXtensible Interface (AXI)
Advanced eXtensible Interface (AXI) is an industry-standard bus used by ARM
processors.
Advanced RISC Machine (ARM)
Advanced RISC Machine (ARM) is a widely-used processor architecture
originally based on a 32-bit reduced instruction set (RISC) computer.
ARM
See Advanced RISC Machine.
AXI
See Advanced eXtensible Interface.
Board Support Package (BSP)
A Board Support Package (BSP) is the layer of software in an embedded
system that contains hardware-specific drivers and other routines that allow a
particular operating system (usually a real-time operating system) to function in a
particular hardware environment integrated with the operating system itself. An
OpenCPI System support Project (OSP) performs the function of a BSP in
OpenCPI.
Central Processing Unit (CPU)
A Central Processing Unit (CPU) is the electronic circuitry that executes
instructions comprising a computer program. A CPU performs basic arithmetic,
logic, controlling, and input/output (I/O) operations specified by the instructions in
the program, in contrast with external components such as main memory and I/O
circuitry and specialized processors such as G raphics P rocessing U nits (GPUs).
CPU
See Central Processing Unit.
Digital Signal Processor (DSP)
A Digital Signal Processor (DSP) is a specialized microprocessor chip with an
architecture that is optimized for the operational needs of digital signal
processing.
digital signal processing
Digital signal processing (also abbreviated to “DSP”) is the use of digital
processing by G eneral- P urpose P rocessors (GPPs) or D igital Si gnal P rocessors
(DSPs) to perform a wide variety of signal processing operations. The digital
signals processed in this way are a sequence of numbers that represent samples
of a continuous variable in a domain such as time, space, or frequency.
OpenCPI Installation Guide Page 103 of 107

DSP
See Digital Signal Processor. This acronym is sometimes also used more
generically for d igital si gnal p rocessing as a class of computational algorithms.
eXtensible Markup Language (XML)
eXtensible Markup Language (XML) is a standardized markup language that
defines a set of rules for encoding documents in a format which is both human-
and machine-readable.
Field-Programmable Gate Array (FPGA)
A Field-Programmable Gate Array (FPGA) is an integrated circuit that is
designed to be configured by a customer or a designer after manufacturing. The
FPGA configuration is generally specified using a hardware description language
(HDL), similar to that used for an Application-specific Integrated Circuit (ASIC).
FPGA
See Field-Programmable Gate Array.
FPGA bitstream
In the context of FPGA development, an FPGA bitstream is a single, standalone
artifact, resulting from building an HDL assembly, that is ready for loading onto an
actual, physical FPGA.
framework
A framework is a development and runtime tool set for a particular class of
software, firmware, or gateware development. OpenCPI is a framework.
gateware
Gateware is source code written in an HDL for an FPGA. Gateware is like
software because it is fully programmable, but it compiles to fully parallel logic,
which allows it to to compute efficiently like hardware. Gateware solutions
achieve performance and flexibility by running on FPGAs.
General-Purpose Processor (GPP)
A General-Purpose Processor (GPP) is a processor designed for general-
purpose computers such as PCs or workstations and for which computation
speed is the primary concern. See also Central Processing Unit (CPU).
GPP
See General-Purpose Processor.
GPU
See Graphics Processing Unit.
Graphics Processing Unit (GPU)
A Graphics Processing Unit (GPU) is a chip or electronic circuit capable of
rendering graphics for display on an electronic device. In the last decade, GPUs
have also been used for more general-purpose computing when algorithms can
exploit the same highly parallel architectures.
OpenCPI Installation Guide Page 104 of 107

Hardware Description Language (HDL)
Hardware Description Language (HDL) is a specialized language used to
program the structure design and operation of digital logic circuits. In OpenCPI,
it is an authoring model using the VHDL language and is targeted at FPGAs.
HDL workers should be developed according to the HDL authoring model
described in the OpenCPI HDL Development Guide.
HDL
See Hardware Description Language.
Integrated Synthesis Environment (ISE®) Design Suite
The Xilinx Integrated Synthesis Environment (ISE) Design Suite is a
discontinued software tool for synthesis and analysis of HDL designs, which
primarily targets development of embedded firmware for Xilinx FPGA and
Complex Programmable Logic Device (CPLD) integrated circuit (IC) product
families. Use of the last released edition continues for in-system programming of
legacy hardware designs containing older FPGAs and CPLDs otherwise
orphaned by the replacement design tool, Vivado ® Design Suite .
ISE® Simulator (Isim)
The ISE Simulator (ISim) is the HDL simulator provided with the Xilinx ISE ®
Design Suite. In OpenCPI, this simulator is called the isim HDL platform.
isim
See I ntegrated S ynthesis E nvironment (ISE ® ) Simulato r (ISim) .
OCL, OpenCL
See Open Computing Language.
Open Computing Language (OCL, OpenCL)
The Open Computing Language (OCL, OpenCL) is a language and runtime for
writing programs that, subject to the availability of appropriate tools, may execute
on different types of processors, e.g. C entral Pr ocessing U nits (CPUs), G raphics
P rocessing U nits (GPUs), D igital Si gnal P rocessors (DSPs), F ield- P rogrammable
G ate Ar rays (FPGAs) and other processors or hardware accelerators. OpenCL
is an open standard maintained by the non-profit technology consortium Khronos
Group.
OSS
See Open Source Software.
Open Source Software (OSS)
Open Source Software (OSS) is a type of computer software in which source
code is released under a license in which the copyright holder grants users the
rights to use, study, change, and distribute the software to anyone and for any
purpose. Open Source Software may be developed in a collaborative public
manner.
OpenCPI Installation Guide Page 105 of 107

PCI
See Peripheral Component Interconnect.
PCIe
See Peripheral Component Interconnect Express.
Peripheral Component Interconnect (PCI)
Peripheral Component Interconnect (PCI) is a local computer bus for attaching
hardware devices in a computer and is part of the PCI Local Bus standard. The
PCI bus supports the functions found on a processor bus but in a standardized
format that is independent of any given processor's native bus. Devices
connected to the PCI bus appear to a bus master to be connected directly to its
own bus and are assigned addresses in the processor's address space. PCI is a
parallel bus, synchronous to a single bus clock. Attached devices can take either
the form of an integrated circuit fitted onto the motherboard (called a planar
device in the PCI specification) or an expansion card that fits into a slot.
Peripheral Component Interconnect Express (PCIe)
Peripheral Component Interconnect Express (PCIe) is a high-speed serial
computer expansion bus standard that is designed to replace the older PCI, PCI-
X and AGP bus standards. Improvements over the older standards include
higher maximum system bus throughput, lower I/O pin count and smaller
physical footprint, better performance scaling for bus devices, a more detailed
error detection and reporting mechanism and native hot-swap functionality. More
recent revisions of the PCIe standard provide hardware support for I/O
virtualization.
RPM
See RPM Package Manager.
RPM Package Manager (RPM)
The RPM Package Manager (RPM) is a free and open-source package
management system used in some Linux distributions. The name “RPM” refers
to .rpm file format and to the Package Manager program command itself.
System on a Chip (SoC)
A system on a chip (SoC) is a single integrated circuit (IC, or “chip”) that
integrates all or most components of a computer or other electronic system. SoC
is a complete electronic substrate system that may contain analog, digital, mixed-
signal or radio frequency functions. Its components usually include a G raphi cs
P rocessing U nit (GPU), a C entral P rocessing U nit (CPU) that may be multi-core,
and system memory (RAM). SoCs are in contrast to the common traditional
motherboard-based PC architecture, which separates components based on
function and connects them through a central interfacing circuit board. SoCs
used with OpenCPI typically also contain FPGAs.
OpenCPI Installation Guide Page 106 of 107

Verilog
Verilog is a hardware description language (HDL) used to model electronic
systems. Verilog is standardized as IEEE 1364.
VHSIC Hardware Description Language (VHDL)
VHDL is a hardware description language used in electronic design automation
to describe digital and mixed-signal systems such as FPGAs and integrated
circuits (ICs). VHDL can also be used as a general-purpose parallel
programming language.
Vivado® Design Suite (Vivado, Xilinx Vivado)
The Xilinx Vivado Design Suite is a software suite for synthesis and analysis of
HDL designs. Vivado is an integrated design environment (IDE) with system-to-
IC level tools built on a shared scalable data model and a common debug
environment. Vivado supersedes Xilinx ISE with additional features for system
on a chip development and high-level synthesis. Vivado WebPACK Edition is a
free version of Vivado that provides designers with a limited version of the Vivado
Design Suite environment.
Vivado® Simulator
Vivado Simulator is an HDL event-driven simulator that Xilinx provides with
Vivado Design Suite and WebPACK Edition. In OpenCPI, this simulator is called
the xsim HDL platform.
XML
See eXtensible Markup Language.
Xsim
See Vivado ® Simulator .
OpenCPI Installation Guide Page 107 of 107
